 STEP13_BinaryCounter
STEP13_BinaryCounter乮侾乯STEP13_BinaryCounter
STEP13_BinaryCounter僜乕僗僾儘僌儔儉傪埲壓偵帵偟傑偡丅
/*****************************
STEP13_BinaryCounter.c
*****************************/
#define _LEGACY_HEADERS
// 僀儞僋儖乕僪僼傽僀儖偺撉傒崬傒
#include <pic.h>
// 僐儞僼傿僊儏儗乕僔儑儞儚乕僪偺愝掕
__CONFIG ( UNPROTECT & LVPDIS & BOREN & MCLREN & PWRTEN & WDTDIS & INTIO );
// 僾儘僩僞僀僾愰尵
void WaitTime (int cnt);
// 儊僀儞娭悢
void main (void)
{
// 1,2,17,18抂巕傪擖弌椡抂巕偵愝掕
CMCON = 0x07;
// 揹埑儗儀儖偺弶婜愝掕
PORTA = 0xFF;
PORTB = 0xFF;
// 擖弌椡愝掕
TRISA = 0b00101111;
TRISB = 0x00;
// 塱媣儖乕僾
while(1)
{
// SW1偑ON偺応崌
if(RA0 == 0)
{
// 懸偪帪娫娭悢偺屇傃弌偟乮栺10m昩丗僠儍僞儕儞僌懳嶔乯
WaitTime (500);
// SW1偑ON偺娫儖乕僾
while( RA0 == 0 )
;
// 懸偪帪娫娭悢偺屇傃弌偟乮栺10m昩丗僠儍僞儕儞僌懳嶔乯
WaitTime (500);
// PORT儗僕僗僞偺抣偑0偱偼側偄応崌
if(PORTB != 0b00000000)
{
// PORTB儗僕僗僞傪1儅僀僫僗偡傞
PORTB = PORTB - 1;
}
}
// SW2偑ON偺娫
else if(RA1 == 0)
{
// 懸偪帪娫娭悢偺屇傃弌偟乮栺10m昩丗僠儍僞儕儞僌懳嶔乯
WaitTime (500);
// SW2偑ON偺娫儖乕僾
while(RA1 == 0)
;
// 懸偪帪娫娭悢偺屇傃弌偟乮栺10m昩丗僠儍僞儕儞僌懳嶔乯
WaitTime (500);
//
if(PORTB != 0b11111111)
{
// PORTB儗僕僗僞傪1僾儔僗偡傞
PORTB = PORTB + 1;
}
}
// SW3偑ON偺娫
else if(RA2 == 0)
{
// 懸偪帪娫娭悢偺屇傃弌偟乮栺10m昩丗僠儍僞儕儞僌懳嶔乯
WaitTime (500);
// SW3偑ON偺娫儖乕僾
while(RA2 == 0)
;
// 懸偪帪娫娭悢偺屇傃弌偟乮栺10m昩丗僠儍僞儕儞僌懳嶔乯
WaitTime (500);
// PORB儗僕僗僞傪僋儕傾
PORTB = 0b00000000;
}
// SW4偑ON偺娫
else if(RA3 == 0)
{
// 懸偪帪娫娭悢偺屇傃弌偟乮栺10m昩丗僠儍僞儕儞僌懳嶔乯
WaitTime (500);
// SW4偑ON偺娫儖乕僾
while(RA3 == 0)
;
// 懸偪帪娫娭悢偺屇傃弌偟乮栺10m昩丗僠儍僞儕儞僌懳嶔乯
WaitTime (500);
// PORTB儗僕僗僞偵255傪戙擖
PORTB = 0b11111111;
}
}
}
// 懸偪帪娫娭悢
void WaitTime ( int cnt )
{
while (cnt > 0)
cnt--;
}
丂乮俀乯STEP13_BinaryCounter僜乕僗僾儘僌儔儉偺幚峴
* SW1傪1夞墴偡偲俴俤俢偺2恑昞帵抣偑1偩偗憹壛偟傑偡丅
*俽倂2傪1夞墴偡偲俴俤俢偺2恑昞帵抣偑1偩偗尭彮偟傑偡丅
*俽倂3傪墴偡偲俴俤俢偺2恑昞帵抣偑0b11111111偲側傝傑偡丅
*SW4傪墴偡偲俴俤俢偺2恑昞帵抣偑0b00000000偲側傝傑偡丅
STEP13_RisingEdgeFailed乮侾乯STEP13_RisingEdgeFailed僜乕僗僾儘僌儔儉
STEP13_RisingEdgeFailed僜乕僗僾儘僌儔儉傪埲壓偵帵偟傑偡丅
/*****************************
STEP13_RisingEdgeFailed.c
*****************************/
#define _LEGACY_HEADERS
// 僀儞僋儖乕僪僼傽僀儖偺撉傒崬傒
#include <pic.h>
// 僐儞僼傿僊儏儗乕僔儑儞儚乕僪偺愝掕
__CONFIG ( UNPROTECT & LVPDIS & BOREN & MCLREN & PWRTEN & WDTDIS & INTIO );
// 儊僀儞娭悢
void main (void)
{
// 1,2,17,18抂巕傪擖弌椡抂巕偵愝掕
CMCON = 0x07;
// 揹埑儗儀儖偺弶婜愝掕
PORTA = 0xFF;
PORTB = 0xFF;
// 擖弌椡愝掕
TRISA = 0b00101111;
TRISB = 0x00;
// 塱媣儖乕僾
while(1)
{
// SW1偑ON偺応崌
if( RA0 == 0 )
{
// SW1偑ON偺娫儖乕僾
while( RA0 == 0 )
;
// LED1忬懺斀揮
RB0 = ~RB0;
}
}
}
丂乮俀乯STEP13_RisingEdgeFailed僜乕僗僾儘僌儔儉偺幚峴
*SW1擖椡怣崋偺RA0偺揹埑曄壔偲LED1弌椡怣崋偺RB0偺揹埑曄壔傪應掕偟偨寢壥傪恾11-1偵帵偟傑偡丅
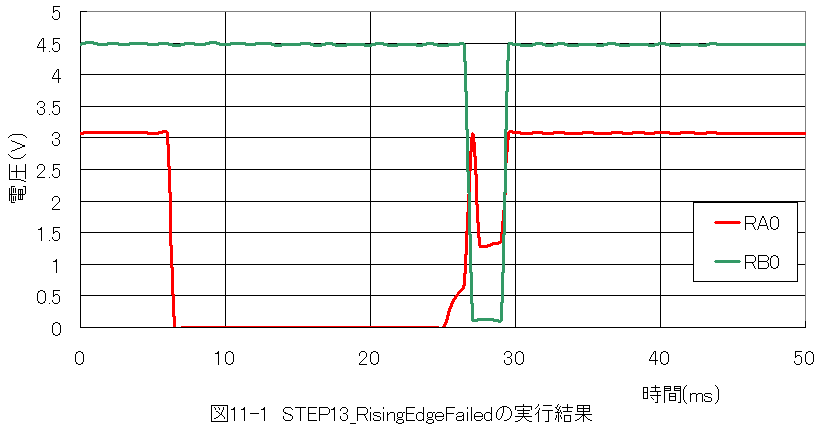
丂恾11-1偐傜SW1偺僠儍僞儕儞僌偵傛傝LED1偺弌椡偑岆摦嶌偡傞偙偲偑妋擣偱偒傑偡丅
STEP13_RisingEdgeSuccessful乮侾乯STEP13_RisingEdgeSuccessful僜乕僗僾儘僌儔儉
STEP13_RisingEdgeSuccessful僜乕僗僾儘僌儔儉傪埲壓偵帵偟傑偡丅
/*****************************
STEP13_RisingEdgeSuccessful.c
*****************************/
#define _LEGACY_HEADERS
// 僀儞僋儖乕僪僼傽僀儖偺撉傒崬傒
#include <pic.h>
// 僐儞僼傿僊儏儗乕僔儑儞儚乕僪偺愝掕
__CONFIG ( UNPROTECT & LVPDIS & BOREN & MCLREN & PWRTEN & WDTDIS & INTIO );
// 僾儘僩僞僀僾愰尵
void WaitTime (int cnt);
// 儊僀儞娭悢
void main (void)
{
// 1,2,17,18抂巕傪擖弌椡抂巕偵愝掕
CMCON = 0x07;
// 揹埑儗儀儖偺弶婜愝掕
PORTA = 0xFF;
PORTB = 0xFF;
// 擖弌椡愝掕
TRISA = 0b00100011;
TRISB = 0x00;
// 塱媣儖乕僾
while(1)
{
// SW1偑ON偺応崌
if(RA0 == 0)
{
// 懸偪帪娫娭悢偺屇傃弌偟乮栺10m昩丗僠儍僞儕儞僌懳嶔乯
WaitTime (500);
// SW1偑ON偺娫儖乕僾
while (RA0 == 0)
;
// 懸偪帪娫娭悢偺屇傃弌偟乮栺10m昩丗僠儍僞儕儞僌懳嶔乯
WaitTime (500);
//
RB0 = ~RB0;
}
}
}
// 懸偪帪娫娭悢
void WaitTime ( int cnt )
{
while (cnt > 0)
cnt--;
}
丂乮俀乯STEP13_RisingEdgeSuccessful僜乕僗僾儘僌儔儉偺幚峴
*SW1擖椡怣崋偺RA0偺揹埑曄壔偲LED1弌椡怣崋偺RB0偺揹埑曄壔傪應掕偟偨寢壥傪恾11-2偵帵偟傑偡丅
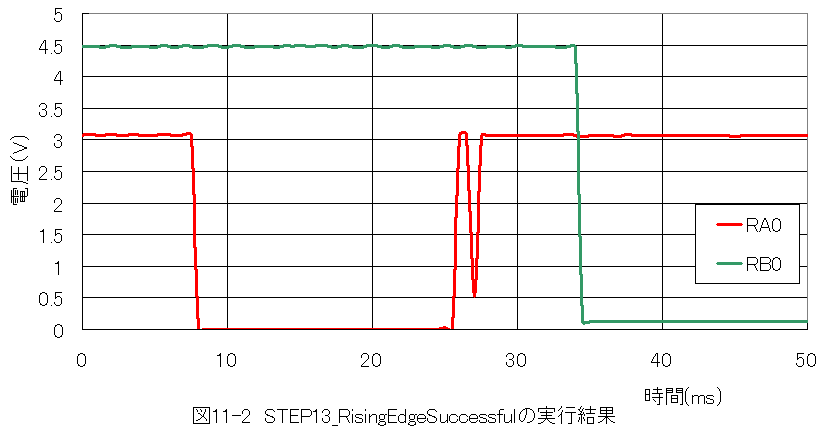
丂恾11-2偐傜SW1偺僠儍僞儕儞僌偵傛傞LED1弌椡偺岆摦嶌傪栺10ms偺僨傿儗僀偱杊巭偡傞偙偲偑妋擣偱偒傑偡丅
 侾俀復丗奜晹妱傝崬傒偵峴偔丅
侾俀復丗奜晹妱傝崬傒偵峴偔丅