 フルカラーLED の購入先と価格
フルカラーLED の購入先と価格(1)購入先:秋月電子通商
(2)品名:イルミネーション・フルカラーLED 5mm 丸型 OSTB5131A-ID 10個入
(3)価格:¥550
*単なるかざりとしてつけてみました!!
イルミネーション・フルカラーLED 5mm 丸型 OSTB5131A-IDの仕様仕様詳細は13-1.pdfを参照願います。
 [13-1.pdf]をダウンロードする。動くおもちゃ回路図
[13-1.pdf]をダウンロードする。動くおもちゃ回路図動くおもちゃ回路図を以下に示します。
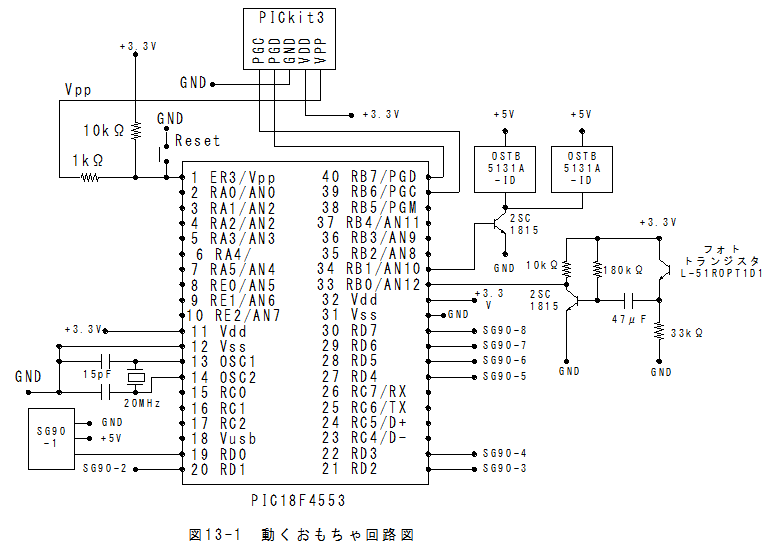
*電源回路は省略しました。
*DC5V電源が500mAですと容量不足となります。(1000μFコンデンサをつけてもだめでした。)
*DC5V2Aの電源ですと正常に動作します。
*3.3V電源は低損失CMOS三端子レギュレータ 3.3V150mA XC6202P332TBと1μFコンデンサを使用しました。
*SG90-2からSG90-8の電源とGNDは記載を省略しました。
*アナログ端子とUSBは使用しません。
赤外線受信関係のプログラムコード*アナログ入力もUSBも使用しないため、基本設定は標準的なものとなります。
(1)関数宣言
void InitInterTimer0 (void);でタイマー0の初期設定をおこないます。
(2)グローバル変数宣言
unsigned short gB=0,gC=0,gT=0;
*ひとつ前のタイミングでRB0=1の時にgB=1、RB0=0の時にgB=0となります。
*gCはRB0が0→1に変化してからのタイマーカウンタです。
*gTはRB0が1→0に変化した時のタイマーカウンタ値を記録します。
*gTの値が信号パルス幅に比例した値となります。
(3)void main (void)での呼び出し
// タイマ0割込み設定関数の呼び出し
InitInterTimer0();
// 割込み全体の許可
GIE = 1;
(4)タイマ0割込み設定関数
// タイマ0割込み設定関数
void InitInterTimer0 (void)
{
// クロック源を内部クロックに設定
T0CS = 0;
// プリスケーラをタイマ0に割り当て
PSA = 0;
// プリスケーラ値を64に設定
T0CONbits.T0PS0 = 1;//PIC18F4553
T0CONbits.T0PS1 = 0;//PIC18F4553
T0CONbits.T0PS2 = 1;//PIC18F4553
// TMR0レジスタをクリア
TMR0 = 0x0000;
// タイマ0割込みフラグをクリア
T0IF = 0;
// タイマ0割込みの許可
T0IE = 1;
}
(5)割込みサービスルーチン
static void interrupt isr()
{
if(gB==1)
{
if(PORTBbits.RB0 == 1)
{
gC++;gB=1;
}
else
{
gT=gC;gB=0;
}
}
else
{
if(PORTBbits.RB0 == 1)
{
gC=0;gB=1;
}
else
{
gC=0;gB=0;
}
}
// タイマ0割込みフラグをクリア
T0IF = 0;
}
マイクロサーボ SG90関係のプログラムコード(1)宣言
#define _XTAL_FREQ 48000000 //__delay_msマイコンの動作周波数を設定します。48MHz
void RUN1(void);//SW1で動作
void RUN2(void);//SW2で動作
void RUN3(void);//SW3で動作
void RUN4(void);//SW4で動作
(2)void main (void)での呼び出し
以下のコードで原点復帰をさせます。
for ( i = 0; i < 10; i++ )
{
PORTDbits.RD0=1;
PORTDbits.RD1=1;
PORTDbits.RD2=1;
PORTDbits.RD3=1;
PORTDbits.RD4=1;
PORTDbits.RD5=1;
PORTDbits.RD6=1;
PORTDbits.RD7=1;
__delay_ms( 1 );
__delay_us( 500 );
PORTDbits.RD0=0;
PORTDbits.RD1=0;
PORTDbits.RD2=0;
PORTDbits.RD3=0;
PORTDbits.RD4=0;
PORTDbits.RD5=0;
PORTDbits.RD6=0;
PORTDbits.RD7=0;
for ( j = 0; j < 2; j++ )__delay_ms( 10 );
}
以下のコードで動作を決定します。
while(1)
{
//RUN1();
if(gT > 0X0020 && gT < 0x0028)
{
RUN1();
gT=0;
}
if(gT > 0X0010 && gT < 0X0015)
{
RUN2();
gT=0;
}
if(gT > 0X0009 && gT < 0X000D)
{
RUN3();
gT=0;
}
if(gT > 0X0001 && gT < 0X0006)
{
RUN4();
gT=0;
}
}
(1)SW1時の動作
void RUN1(void)
{
int i;
for ( i = 0; i < 20; i++ )
{
PORTDbits.RD3=1;
PORTDbits.RD4=1;
PORTDbits.RD5=1;
__delay_ms( 1 );
PORTDbits.RD3=0;
__delay_ms( 1 );
PORTDbits.RD4=0;
PORTDbits.RD5=0;
__delay_ms( 10 );
}
for ( i = 0; i < 30; i++ ){__delay_ms( 10 );}
for ( i = 0; i < 20; i++ )
{
PORTDbits.RD0=1;
PORTDbits.RD1=1;
PORTDbits.RD2=1;
__delay_ms( 1 );
PORTDbits.RD0=0;
PORTDbits.RD2=0;
__delay_ms( 1 );
PORTDbits.RD1=0;
__delay_ms( 10 );
}
for ( i = 0; i < 20; i++ )
{
PORTDbits.RD3=1;
PORTDbits.RD4=1;
PORTDbits.RD5=1;
__delay_ms( 1 );
PORTDbits.RD4=0;
PORTDbits.RD5=0;
__delay_ms( 1 );
PORTDbits.RD3=0;
__delay_ms( 10 );
}
for ( i = 0; i < 30; i++ ){__delay_ms( 10 );}
for ( i = 0; i < 20; i++ )
{
PORTDbits.RD0=1;
PORTDbits.RD1=1;
PORTDbits.RD2=1;
__delay_ms( 1 );
PORTDbits.RD1=0;
__delay_ms( 1 );
PORTDbits.RD0=0;
PORTDbits.RD2=0;
__delay_ms( 10 );
}
}
全体プログラム詳細は13-1.txtファイルを参照願います。
[13-1.txt]をダウンロードする。ソフト編まとめ(1)動くおもちゃはUSB通信もアナログ入力も使用しないため、プログラム自体は比較的単純です。
(2)マイコンとしては、低機能のマイコンでも十分に動作可能と思います。
(3)マイクロサーボ SG90を同時に3個動作すると5V500mAの電源では容量不足となります。
(4)乾電池では消耗が早く、交換がわずらわしくなります。
(5)SG90を同時に3個以上動作するには5V2Aの電源が必要となります。
(6)マイクロサーボ SG90の停止位置精度はおおざっぱで精密な制御にはむきません。
(7)動きはおおざっぱのプログラムしました。
(8)イルミネーション・フルカラーLED 5mm 丸型 OSTB5131A-IDは制御不要ですが、見た目はきれいです。
 14章:7セグメントLED表示器に行く。
14章:7セグメントLED表示器に行く。