丂俈僙僌儊儞僩俴俤俢昞帵婍偲俲宆擬揹懳僾儘乕僽傪巊梡偟偰丄崅壏梡壏搙儗僐乕僟傪惢嶌偟傑偡丅
 崅壏梡壏搙儗僐乕僟夞楬恾
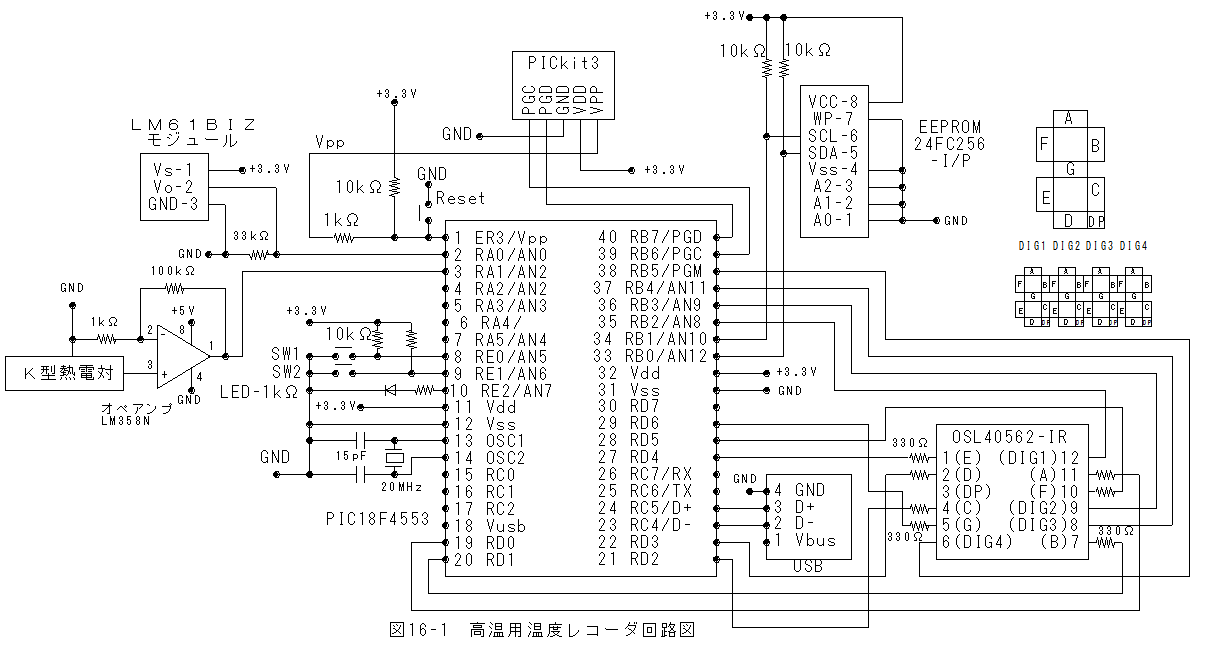
崅壏梡壏搙儗僐乕僟夞楬恾丂崅壏梡壏搙儗僐乕僟夞楬恾傪埲壓偵帵偟傑偡丅
丂
*俈僙僌儊儞僩俴俤俢昞帵婍偼攝慄検偑憹戝偟傑偡偑丄埨壙偱掅揹椡偱偡丅
*崅惛搙俬俠壏搙僙儞僒俴俵俇侾俛俬倅偺弌椡抂偵33k兌偺晧壸掞峈傪偮偗傞偲弌椡偑埨掕偟傑偟偨丅
*僔儕傾儖俬僗働傾俠丂俤俤俹俼俷俵丂俀係俥俠俀俆俇亅俬乛俹偱摦嶌忦審偺愝掕偲應掕僨乕僞偺婰榐傪峴偄傑偡丅
*俲宆擬揹懳僾儘乕僽偺弌椡揹埑傪旕斀揮憹暆夞楬偱101攞偵憹暆偟偰AD曄姺偟傑偡丅
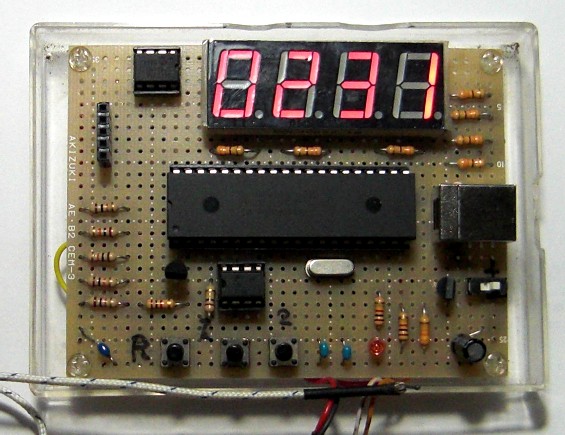
崅壏梡壏搙儗僐乕僟夞楬偺奜娤丂崅壏梡壏搙儗僐乕僟夞楬偺奜娤傪埲壓偵帵偟傑偡丅
 昡壙僾儘僌儔儉
昡壙僾儘僌儔儉丂傑偢偼壓婰偺乽41-16.zip乿僼傽僀儖傪僟僂儞儘乕僪偟偰偔偩偝偄丅
 [41-16.zip]傪僟僂儞儘乕僪偡傞丅
[41-16.zip]傪僟僂儞儘乕僪偡傞丅夝搥偡傞偲僼僅儖僟乕撪偵UMy-CDC-Basic僼僅儖僟乕偲dynamic_cdc_demo.exe偑偁傝傑偡丅USB-HID-SCD僼僅儖僟乕撪偵
乮侾乯UMy-CDC-Basic僼僅儖僟乕
*My-CDC-Basic.X偑僜乕僗僾儘僌儔儉偱偡丅
*乽XC8乿梡偱偡丅
乮俀乯dynamic_cdc_demo.exe
*昗弨偺Windows梡幚峴僼傽僀儖偱偡丅
*Win-PingPong.exe偱傕摨條側憖嶌偑偱偒傑偡丅
乮俁乯拲堄帠崁
*忋婰僾儘僌儔儉偼俹俬俠侾俉俥係俆俆俁梡偱偡丅
憖嶌曽朄乮侾乯俹俬俠侾俉俥係俆俆俁偵僾儘僌儔儉傪彂崬傒傑偡丅
乮俀乯USB傪愙懕偟丄摦嶌忦審傪僔儕傾儖俬僗働傾俠丂俤俤俹俼俷俵丂俀係俥俠俀俆俇亅俬乛俹偵彂崬傒傑偡丅
乮俁乯dynamic_cdc_demo.exe傪婲摦偟傑偡丅
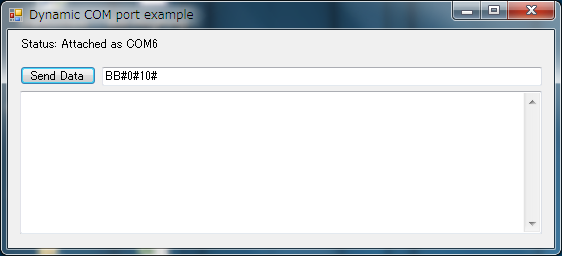
乮係乯昗弨摦嶌忦審乮崅壏應掕儌乕僪丄應掕娫妘1倱乯傪彂崬傒傑偡丅
*Send Data偵BB#0#10#傪愝掕偟偰丄Send Data儃僞儞傪墴偟傑偡丅
乮俆乯應掕儌乕僪
0丗崅壏應掕儌乕僪
1丗婥壏應掕儌乕僪
2丗婥壏AD曄姺抣乮僨僶僢僌梡乯
3丗擬揹懳AD曄姺抣乮僨僶僢僌梡乯
乮俇乯應掕娫妘
*0.1倱崗傒偱愝掕偱偒傑偡丅
*愝掕壜擻嵟戝抣偼0XFFFF亖65535偱偡丅乮6553.5倱乯
乮俇乯僨乕僞儗僐乕僪奐巒
*SW1傪墴偡偲LED偑揰摂偟丄僨乕僞No=0偐傜儗僐乕僪傪奐巒偟傑偡丅
乮俈乯僨乕僞儗僐乕僪廔椆
*SW2傪墴偡偲LED偑徚摂偟丄儗僐乕僪傪廔椆偡傞偲偲傕偵丄僨乕僞悢傪婰榐偟傑偡丅
*偙偺屻揹尮傪愗偭偰傕僨乕僞悢偲僨乕僞偼曐帩偝傟傑偡丅
乮俈乯儗僐乕僪僨乕僞偺撉庢
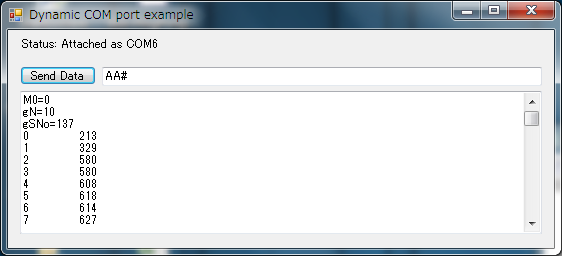
*Send Data偵AA#傪愝掕偟偰丄Send Data儃僞儞傪墴偟傑偡丅
乮俉乯撉庢僨乕僞偺僐僺乕丄儁乕僗僩
*僥僉僗僩儃僢僋僗傪塃僋儕僢僋偟偰偡傋偰慖戰傪偊傜傃傑偡丅
*僥僉僗僩儃僢僋僗傪塃僋儕僢僋偟偰僐僺乕傪慖戰偟傑偡丅
*EXCEL悢昞偵儁乕僗僩偟傑偡丅
應掕椺丂僈僗僐儞儘偱悈傪擖傟偨側傋傪夁擬偟偨応崌偺壏搙曄壔傪挷傋傑偟偨丅
乮侾乯悢抣僨乕僞
丂悢抣僨乕僞偼埲壓偺傛偆偵側傝傑偡偑丄No14埲崀偼徣棯偟傑偡丅
M0=0
gN=10
gSNo=137
0 213
1 329
2 580
3 580
4 608
5 618
6 614
7 627
8 642
9 644
10 644
11 644
12 644
13 646
乮俀乯僈僗僐儞儘偱悈傪擖傟偨側傋傪夁擬偟偨応崌偺壏搙曄壔僌儔僼
丂壏搙曄壔僌儔僼傪埲壓偵帵偟傑偡丅
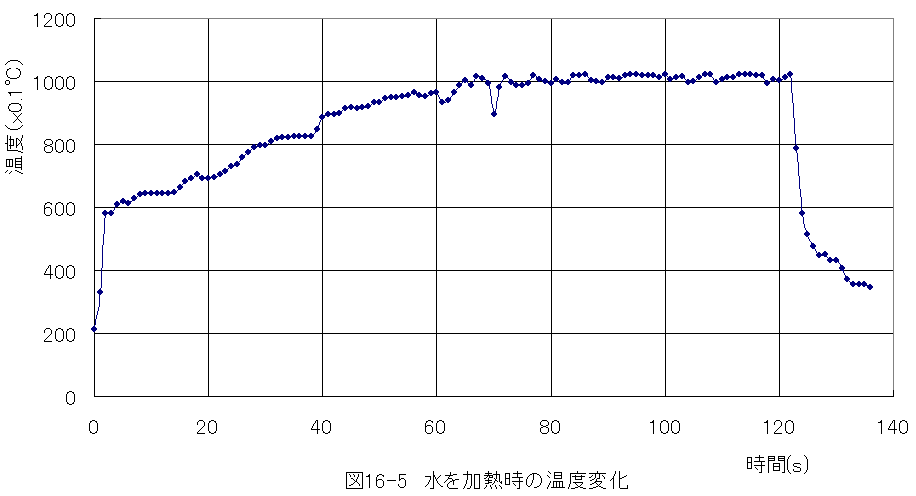
丂栺100亷偱壏搙偑堦掕偵側傞偙偲偑妋擣偱偒傑偡丅
My-CDC-Basic.X僾儘僌儔儉僐乕僪偺億僀儞僩*MPLAB_X_IDE丵v2.25偲PIC18F4553儅僀僐儞偺暅廗丄俁復丗僒儞僾儖僾儘僌儔儉偺僼傽僀儖峔憿偺曄峏偲僇僗僞儅僀僘傪儀乕僗偵廋惓偟傑偟偨丅
乮侾乯僞僀儅0妱崬傒愝掕娭悢
*system.c偲system.h偵掕媊偟傑偟偨丅
*2930Hz偺妱崬傒傪敪惗偟傑偡丅
*MAIN_RETURN main(void)偱撉傒弌偟傑偡丅
// 僞僀儅0妱崬傒愝掕娭悢
void InitInterTimer0 (void)
{
// 僋儘僢僋尮傪撪晹僋儘僢僋偵愝掕
T0CS = 0;
// 僾儕僗働乕儔傪僞僀儅0偵妱傝摉偰
PSA = 0;
// 僾儕僗働乕儔抣傪16偵愝掕=妱崬傒廃攇悢亖48MH倸/乮4*256*16乯亖2930Hz
T0CONbits.T0PS0 = 1;//PIC18F4553
T0CONbits.T0PS1 = 1;//PIC18F4553
T0CONbits.T0PS2 = 0;//PIC18F4553
// TMR0儗僕僗僞傪僋儕傾
TMR0 = 0x0000;
// 僞僀儅0妱崬傒僼儔僌傪僋儕傾
T0IF = 0;
// 僞僀儅0妱崬傒偺嫋壜
T0IE = 1;
}
乮俀乯妱崬傒張棟娭悢
*system.c偲system.h偵掕媊偝傟偰偄傑偡丅
*俈僙僌儊儞僩俴俤俢昞帵婍偺惂屼傪峴偄傑偡丅乮2930Hz偱昞帵愗懼乯
*0.1倱枅偺妱崬傒娭悢傪屇傃弌偟傑偡丅
*USB妱崬傒偵張棟傪峴偄傑偡丅
void interrupt SYS_InterruptHigh(void)
{
if(T0IF == 1)
{
switch (gCT)
{
case 0:
gCT++;
PORTD=~CH[gNo3];
PORTB=0X04;
break;
case 1:
gCT++;
PORTD=~CH[gNo2];
PORTB=0X08;
break;
case 2:
gCT++;
PORTD=~CH[gNo1];
PORTB=0X10;
break;
case 3:
gCT++;
PORTD=~CH[gNo0];
PORTB=0X20;
break;
default:
gCT=0;
break;
}
gCT2++;
if(gCT2>293)
{
gCT2=0;
Int_Low();
}
// 僞僀儅0妱崬傒僼儔僌傪僋儕傾
T0IF = 0;
}
#if defined(USB_INTERRUPT)
//***曄峏1
if(PIR2bits.USBIF == 1){USBDeviceTasks();}
#endif
}
乮俁乯0.1倱枅偺妱崬傒張棟娭悢
*system.c偲system.h偵掕媊偟傑偟偨丅
*寁應偲僨乕僞偺曐懚傪峴偄傑偡丅
void Int_Low()
{
//long N=10;
long X;
if(gCT3 < gN)
{
gCT3++;
SX=SX+ADC0();
SX2=SX2+ADC1();
}
else
{
switch (M0)
{
case 0:
X=(796*SX)/(1000*gN)-600+(1880*SX2)/(1000*gN)-70;
break;
case 1:
X=(796*SX)/(1000*gN)-600;
break;
case 2:
X=ADC0();
break;
case 3:
X=ADC1();
break;
default:
break;
}
gCT3=0;
gNo=X;SetgNo();
SX=0;SX2=0;
if(fStart==1)
{
Write_EPROM(2*gSNo+6,(unsigned char)(X/256));
__delay_ms( 10 );
Write_EPROM(2*gSNo+7,(unsigned char)(X));
BfStart=1;
gSNo++;
if(gSNo>15000){gSNo=15000;}//椞堟惂尷
}
else
{
if(BfStart==1)
{
Write_EPROM(4,(unsigned char)(gSNo/256));
__delay_ms( 10 );
Write_EPROM(5,(unsigned char)(gSNo));
}
BfStart=0;
}
}
}
乮係乯AD曄姺張棟娭悢
*app_device_cdc_basic.c偲app_device_cdc_basic.h偵掕媊偟傑偟偨丅
*AD曄姺傪峴偄傑偡丅
unsigned short ADC0()
{
unsigned short result;
long X;
ADCON0bits.GO = 0; // Stop AD conversion
__delay_us( 100 );
ADCON0bits.CHS = 0b0000; //Analog Channel Select bits=Channel 0 (AN0)
__delay_us( 100 );
ADCON0bits.GO = 1; // Start AD conversion
while(ADCON0bits.NOT_DONE); // Wait for conversion
result=ADRESH*256+ADRESL;
return result;
}
unsigned short ADC1()
{
unsigned short result;
long X;
ADCON0bits.GO = 0; // Stop AD conversion
__delay_us( 100 );
ADCON0bits.CHS = 0b0001; //Analog Channel Select bits=Channel 0 (AN0)
__delay_us( 100 );
ADCON0bits.GO = 1; // Start AD conversion
while(ADCON0bits.NOT_DONE); // Wait for conversion
result=ADRESH*256+ADRESL;
return result;
}
乮俆乯USB庴怣張棟娭悢
*app_device_cdc_basic.c偲app_device_cdc_basic.h偵掕媊偟傑偟偨丅
*USB庴怣張棟傪峴偄傑偡丅
void MyCDCBasicTasks()
{
unsigned short X1,X2;
uint16_t i,j,k;
uint8_t numBytesRead;
unsigned char FIN[5][20];
numBytesRead = getsUSBUSART(readBuffer, sizeof(readBuffer));
if( USBUSARTIsTxTrfReady() == true)
{
if(numBytesRead > 0)
{
j=0;k=0;
for(i=0;i5){j=4;}
k=0;
}
else
{
FIN[j][k]=readBuffer[i];
k++;if(k>20){k=19;}
}
}
int TEST=1;
if(FIN[0][0]=='A' && FIN[0][1]=='A' && FIN[0][2]==0)
{
//X1=atof((const char *)FIN[1]);
//X2=atof((const char *)FIN[2]);
//X3=X1+X2;
//RA0=ADC0();
X1=Read_EPROM(0);
X2=256*Read_EPROM(2)+Read_EPROM(3);
gSNo=256*Read_EPROM(4)+Read_EPROM(5);
sprintf(writeBuffer,"M0=%d\r\ngN=%d\r\ngSNo=%d\r\n",X1,X2,gSNo);
numBytesRead = strlen(writeBuffer);
putUSBUSART(writeBuffer,numBytesRead);
TEST=2;
fOut=1;gi=0;
}
if(FIN[0][0]=='B' && FIN[0][1]=='B' && FIN[0][2]==0)
{
X1=atoi((const char *)FIN[1]);
X2=atoi((const char *)FIN[2]);
Write_EPROM(0,(unsigned char)X1);
__delay_ms( 10 );
Write_EPROM(2,(unsigned char)(X2/256));
__delay_ms( 10 );
Write_EPROM(3,(unsigned char)(X2));
__delay_ms( 10 );
M0=X1;gN=X2;
}
}
else
{
if(fOut==1)
{
if(gi < gSNo)
{
X1=256*Read_EPROM(2*gi+6)+Read_EPROM(2*gi+7);
sprintf(writeBuffer,"%d\t%d\r\n",gi,X1);
numBytesRead = strlen(writeBuffer);
putUSBUSART(writeBuffer,numBytesRead);
gi++;
}
else
{
fOut=0;
}
}
}
}
CDCTxService();
}
乮俇乯僌儘乕僶儖曄悢
system.h偵掕媊偟傑偟偨丅
#define _XTAL_FREQ 48000000 //__delay_ms
unsigned char CH[10] = { 0x3F,0x06,0x5B,0x4F,0x66,0x6D,0x7D,0x07,0x7F,0x6F};//俈僙僌LED
unsigned char gCT=0;//僇僂儞僞
unsigned long gCT2=0,gCT3=0;//僇僂儞僞
unsigned short gNo=1234;//俈僙僌LED昞帵
unsigned char gNo3,gNo2,gNo1,gNo0;//俈僙僌LED昞帵
long SX=0,SX2=0;//憤榓梡
unsigned char M0;//摦嶌儌乕僪
unsigned short gN;//寁應娫妘
unsigned short gSNo;//寁應僨乕僞悢
unsigned char fStart=0;//婰榐奐巒丄掆巭
unsigned char BfStart;//傂偲偮慜偺忬懺
unsigned char fOut=0;//USB憲怣僼儔僌
unsigned short gi;//USB憲怣No
崅壏梡壏搙儗僐乕僟揨傔乮侾乯俈僙僌儊儞僩俴俤俢昞帵婍傪巊梡偡傞偙偲偵傛傝丄幚梡揑側崅壏搙儗僐乕僟傪惢嶌偡傞偙偲偑偱偒傑偟偨丅
乮俀乯摦嶌忦審偺儌乕僪愝掕偼僔儕傾儖俬僗働傾俠丂俤俤俹俼俷俵丂俀係俥俠俀俆俇亅俬乛俹偺侽斣傾僪儗僗傪巊梡偟傑偟偨丅
乮俁乯摦嶌忦審偺應掕娫妘愝掕偼俀斣偲俁斣傪巊梡偟傑偟偨丅
乮係乯應掕偟偨僨乕僞悢偼係斣偲俆斣偵婰榐偝傟傑偡丅
乮俆乯應掕僨乕僞偼6斣埲崀偵婰榐偝傟丄嵟戝婰榐僨乕僞悢偼15000偵愝掕偟傑偟偨丅
乮俇乯崅惛搙俬俠壏搙僙儞僒俴俵俇侾俛俬倅偺弌椡抂偵33k兌偺晧壸掞峈傪偮偗傞偲弌椡偑埨掕偟傑偟偨丅
乮俈乯擬揹懳偺弌椡揹埑偼彫偝偄偨傔丄旕斀揮憹暆夞楬偱101攞偵憹暆偟傑偟偨丅
乮俉乯旕斀揮憹暆夞楬偺弌椡揹埑偼丄USB愙懕帪偲愗抐帪偱嬐偐偱偡偑抣偑曄壔偟傑偡丅崅惛搙俬俠壏搙僙儞僒弌椡偼曄壔偟傑偣傫丅
乮俋乯旕斀揮憹暆夞楬偺弌椡揹埑偺USB愙懕帪偲愗抐帪偺曄壔偼丄側傫傜偐偺僴乕僪揑側梫場偵傛偭偰惗偠傞偲巚傢傟傑偡偑柧妋側尨場偼傢偐傝傑偣傫偱偟偨丅
 侾俈復丗俈僙僌儊儞僩俴俤俢昞帵婍乮僇僜乕僪僐儌儞乯偵峴偔丅
侾俈復丗俈僙僌儊儞僩俴俤俢昞帵婍乮僇僜乕僪僐儌儞乯偵峴偔丅