高品位DC12Vブラシ付モータPWN10EB12CBのサーボ制御について検討します。
 高品位DC12Vブラシ付モータ購入先と価格
高品位DC12Vブラシ付モータ購入先と価格*購入先:秋月電子通商
*品名:高品位DC12Vブラシ付モータ PWN10EB12CB
*価格:¥300
高品位DC12Vブラシ付モータPWN10EB12CBの詳細仕様は下記を参照します。
 [66-1.pdf]をダウンロードする。
[66-1.pdf]をダウンロードする。*起動電流が小さいため、制御しやすいDCモータです。
モータードライバー TA7291P (2個入)購入先と価格*購入先:秋月電子通商
*品名:モータードライバー TA7291P (2個入)
*価格:¥300
モータードライバー TA7291P (2個入)の詳細仕様は下記を参照します。
[66-2.pdf]をダウンロードする。*高品位DC12Vブラシ付モータPWN10EB12CBの制御に適しています。
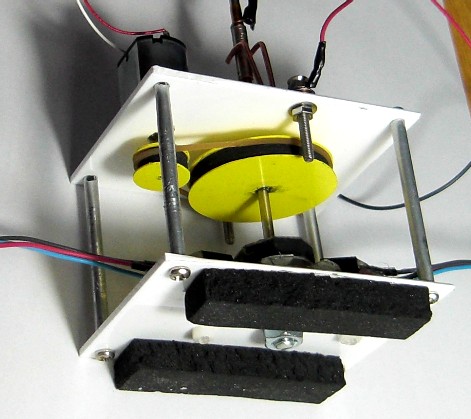
ベルト式変速機構の外観ベルトのかわりに輪ゴムを使用しました。ベルト式変速機構の外観を以下に示します。
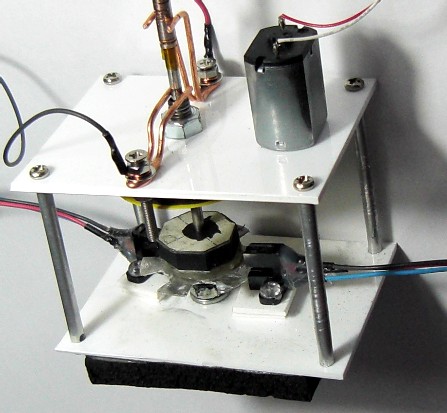
 エンコーダ部外観
エンコーダ部外観エンコーダはt0.5mmのアルミ板で作成しました、外観を以下に示します。
 スリップリング部外観
スリップリング部外観スリップリングを使用してLEDを点灯します、スリップリング部外観を以下に示します。
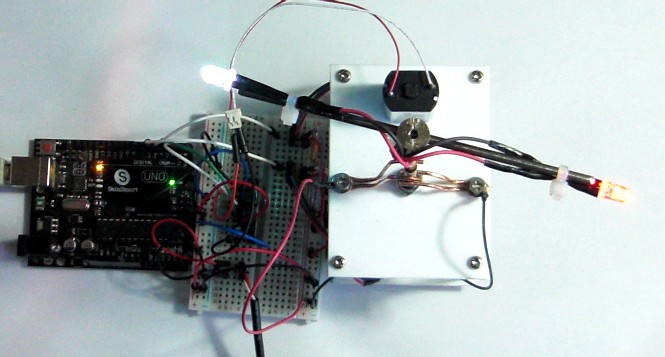
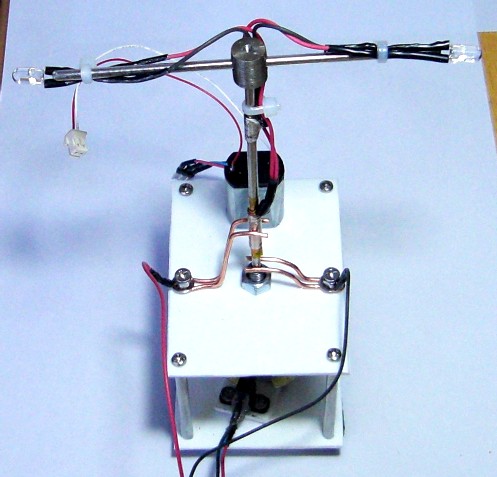 全体外観
全体外観全体外観を以下に示します。
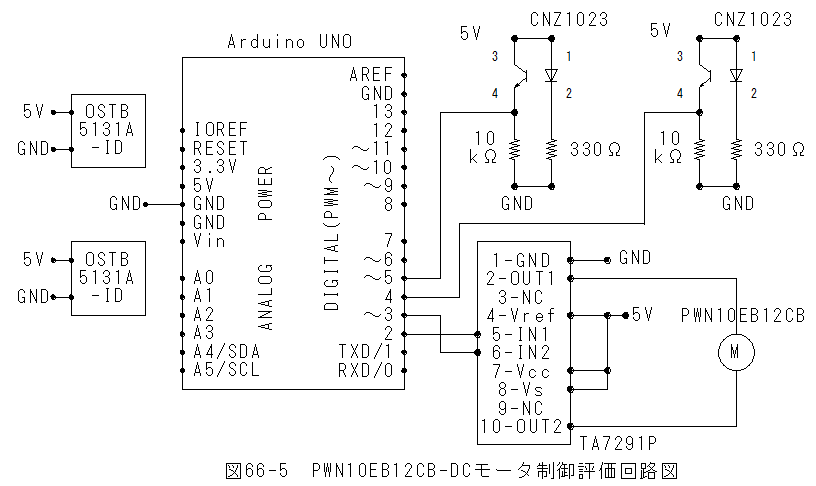
 PWN10EB12CBサーボ制御回路図
PWN10EB12CBサーボ制御回路図PWN10EB12CBサーボ制御回路図を以下に示します。
 Arduinoスケッチ
ArduinoスケッチArduinoスケッチは以下となります。
//DC_Servo
#include <stdlib.h>
int PS1B;
int gPC_T,gPC_N;
char inputString[50];
boolean stringComplete = false; // whether the string is complete
int gi=0;
void setup()
{
Serial.begin(9600);
pinMode(2, OUTPUT);
pinMode(3, OUTPUT);
pinMode(4, INPUT);
pinMode(5, INPUT);
gPC_T=0;
gPC_N=0;
PS1B=digitalRead(4);
}
// the loop function runs over and over again forever
void loop()
{
String str;
int PS1=digitalRead(4);
int PS2=digitalRead(5);
long T1,T2;
long DPC=gPC_T-gPC_N;
if( DPC > 0)
{
T1=DPC*400;
if(T1 > 1000){T1=1000;}
T2=1000-T1;
digitalWrite(2,LOW);
digitalWrite(3,HIGH);
delayMicroseconds(T1);
digitalWrite(2, HIGH);
digitalWrite(3, HIGH);
delayMicroseconds(T2);
}
else
{
T1=(1-DPC)*400;
if(T1 > 1000){T1=1000;}
T2=1000-T1;
digitalWrite(2, HIGH);
digitalWrite(3, LOW);
delayMicroseconds(T1);
digitalWrite(2, HIGH);
digitalWrite(3, HIGH);
delayMicroseconds(T2);
}
str=String(gPC_T)+" "+String(gPC_N);
if(PS1B==HIGH)
{
if(PS1==LOW)
{
PS1B=LOW;
if(PS2==HIGH)
{
gPC_N++;
Serial.println(str);
}
else
{
gPC_N--;
Serial.println(str);
}
}
}
else
{
if(PS1==HIGH)
{
PS1B=HIGH;
if(PS2==LOW)
{
gPC_N++;
Serial.println(str);
}
else
{
gPC_N--;
Serial.println(str);
}
}
}
if (stringComplete)
{
//Serial.println(inputString);
gPC_T = atoi(inputString);
gi=0;
stringComplete= false;
}
}
void serialEvent()
{
while (Serial.available())
{
char inChar = (char)Serial.read();
inputString[gi]=inChar;
if (inChar == '\n')
{
stringComplete = true;
inputString[gi-1]=0;
}
gi++;
}
}
Arduinoスケッチ_テキストファイルArduinoスケッチ_テキストファイルは以下から参照できます。
 Arduinoスケッチ_テキストファイルにいく操作方法
Arduinoスケッチ_テキストファイルにいく操作方法(1)シリアルモニターを開きボーレート9600bpsに設定します。
(2)CRおよびLFを選択します。
(3)送信テキストボックスに20を入力して送信ボタンを押します。
*DCモータが回転して以下の結果が表示されます。
20 0
20 1
20 2
20 3
20 4
20 5
20 6
20 7
20 8
20 9
20 10
20 11
20 12
20 13
20 14
20 15
20 16
20 17
20 18
20 19
20 20
20 21
20 22
20 21
20 20
サーボ制御のポイントサーボ制御のポイントは「目標値-現在値」の値の大きさに応じてどのような制御をするか?ということになります。
一般的なアナログ制御では駆動電圧を線形でフィードバック制御するのが一般的ですが、駆動電圧を変化させるのは面倒なので、駆動時間制御します。
「目標値-現在値」と駆動時間の関係は必ずしも線形にする必要はありません。
本例では以下の関係で制御しました。
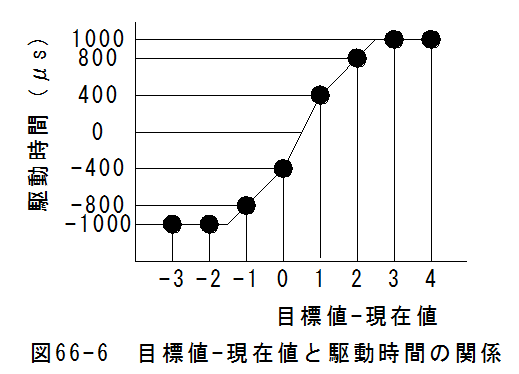
図66-6に示す制御においては、駆動時間がゼロとなることはなく、常に振動状態となります。振動中心は0と1の中間点となります。
高品位DC12Vブラシ付モータPWN10EB12CBのサーボ制御まとめ(1)高品位DC12Vブラシ付モータPWN10EB12CBは起動電流が小さく、制御しやすいDCモータでした。
(2)ベルト式変速機構のベルトは輪ゴムで十分でした。
(3)エンコーダはt0.5mmのアルミ板で十分でした。
(4)手作りのスリップリングもうまく動作しました。
(5)手作りのスリップリング等摩擦の大きい機構ですが、図66-6に示す制御条件でうまく制御できました。