Processingの3D機能を利用して3D機械製図への応用を検討してみたいと思います。
 六角穴付きボルトの寸法図
六角穴付きボルトの寸法図六角穴付きボルトの寸法図を以下に示します。
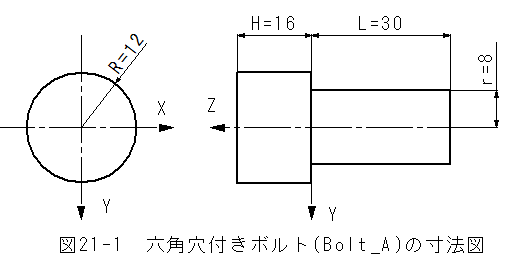
*図21-1からわかるように六角穴付きボルトの基本寸法はrとRとHとLの4個のパラメータで形状が決まります。
*rとRとHとLはfloat型でmm単位で入力とします。
3Dサンプル(sketch_3D_Z_Bolt_A)六角穴付きボルトスケッチ3Dサンプル(sketch_3D_Z_Bolt_A)六角穴付きボルトスケッチスケッチは以下となります。
//sketch_3D_Z_Bolt_A 六角穴付きボルト
void setup()
{
size(400, 400, P3D);
}
void draw()
{
background(255, 255, 255);
lights();
ortho(-width/2, width/2, -height/2, height/2); // Same as ortho()
translate(width / 2, height / 2);
rotateY(map(mouseX, 0, width, -PI/1, PI/1));
rotateX(map(mouseY, 0, height, PI/1, -PI/1));
//noStroke();
strokeWeight(0.1);
fill(255, 255, 255);
scale(4, 4,4);
Bolt_A(8,12,16,30);//六角穴付きボルト (M16x30)
}
void Bolt_A(float r,float R,float H,float L)//六角穴付きボルト
{
pushMatrix();translate(0,0,H/2);
Z_Bar(R,H);popMatrix();//Zバー
pushMatrix();translate(0,0,-L/2);
Z_Bar(r,L);popMatrix();//Zバー
}
void Z_Bar(float r,float L)//Zバー
{
int sides=16;//分割数
int Sn=2;//面数
float Pz[]={-L/2,L/2};//z座標
float R[]={r,r};//回転物半径
int i,j;
float angleIncrement = TWO_PI/sides;
for(j=0;j<Sn-1;j++)
{
float angle = 0;
beginShape(QUAD_STRIP);
for (i = 0; i < sides + 1; ++i)
{
vertex(R[j]*cos(angle), R[j]*sin(angle), Pz[j]);
vertex(R[j+1]*cos(angle), R[j+1]*sin(angle), Pz[j+1]);
angle += angleIncrement;
}
endShape(CLOSE);
}
pushMatrix();translate(0,0,-L/2);
Z_Circle(r);popMatrix();//円
pushMatrix();translate(0,0,L/2);
Z_Circle(r);popMatrix();//円
}
void Z_Circle(float r)//円
{
int sides=16;//分割数
int i;
float angleIncrement = TWO_PI/sides;
float angle = 0;
beginShape();
for (i = 0; i < sides + 1; ++i)
{
vertex(r*cos(angle), r*sin(angle),0);
vertex(r*cos(angle), r*sin(angle),0);
angle += angleIncrement;
}
endShape(CLOSE);
}
3Dサンプル(sketch_3D_Z_Bolt_A)六角穴付きボルトテキストファイル3Dサンプル(sketch_3D_Z_Bolt_A)六角穴付きボルトテキストファイルは以下から参照できます。
 「3Dサンプル(sketch_3D_Z_Bolt_A)六角穴付きボルトテキストファイル」にいく3Dサンプル(sketch_3D_Z_Bolt_A)六角穴付きボルトスケッチの実行
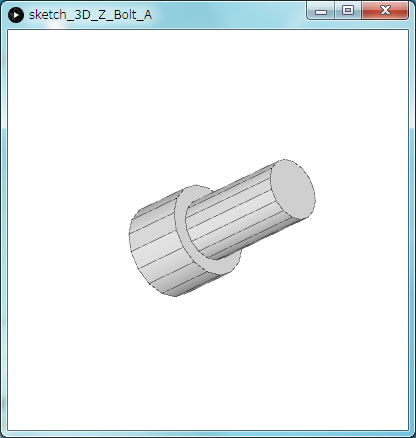
「3Dサンプル(sketch_3D_Z_Bolt_A)六角穴付きボルトテキストファイル」にいく3Dサンプル(sketch_3D_Z_Bolt_A)六角穴付きボルトスケッチの実行(1)3Dサンプル(sketch_3D_Z_Bolt_A)六角穴付きボルトを実行すると実行ウインドウに3D画像が表示されます。
(2)マウスを動かすと表示角度が変化します。
(3)表示画像例を以下に示します。
 3Dサンプル(sketch_3D_Z_Bolt_A)六角穴付きボルトまとめ
3Dサンプル(sketch_3D_Z_Bolt_A)六角穴付きボルトまとめ(1)表示は正投影のortho(-width/2, width/2, -height/2, height/2);としました。
(2)線有りのstrokeWeight(0.1);としました。
(3)Bolt_A(8,12,16,30);//六角穴付きボルト (M16x30)と指定すると指定寸法の六角穴付きボルトが表示できます。