Processingの3D機能を利用して3D機械製図への応用を検討してみたいと思います。
 3Dサンプル(sketch_3D_Engin)エンジン完成図
3Dサンプル(sketch_3D_Engin)エンジン完成図3Dサンプル(sketch_3D_Engin)エンジン完成図を以下に示します。
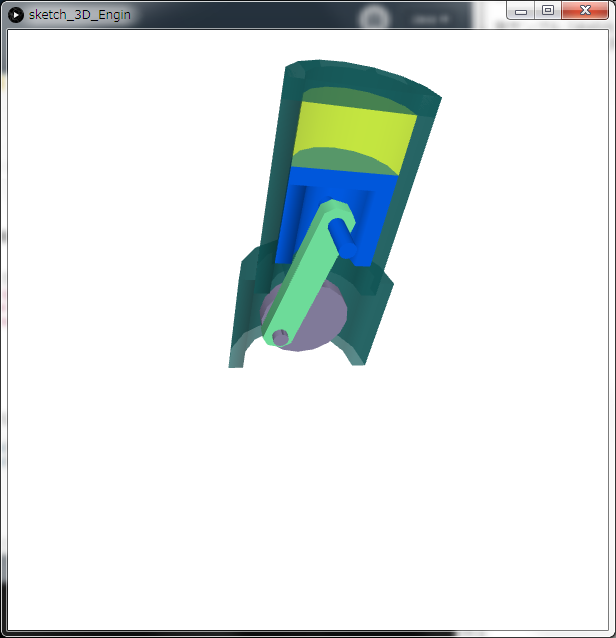
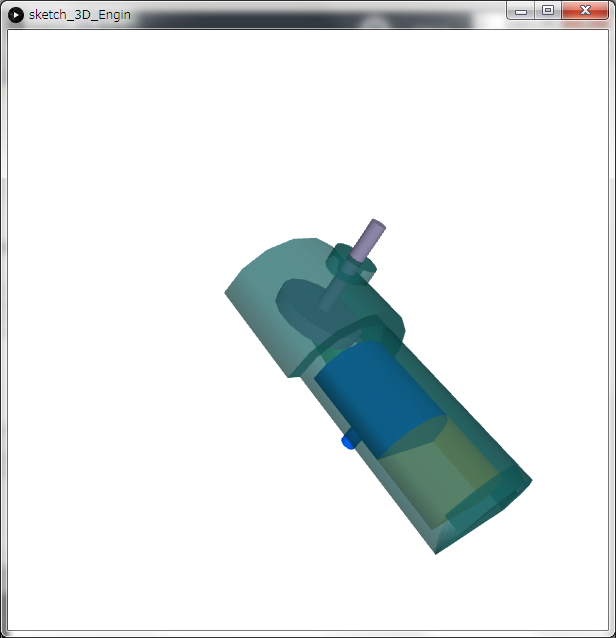
*ピストン運動を繰り返します。
3Dサンプル(sketch_3D_Engin)エンジンスケッチ3Dサンプル(sketch_3D_Engin)エンジンスケッチは以下となります。
//sketch_3D_Engin エンジン
Part P;//使用クラスの定義
int gCT=0;
void setup()
{
size(600, 600, P3D);
P=new Part();//My_OBクラスのオブジェクトを生成
}
void draw()
{
colorMode(HSB,100,100,100,100);
background(0,0,100);
lights();
//ortho(-width/2, width/2, -height/2, height/2); // Same as ortho()
translate(width / 2, height / 2);
rotateY(map(mouseX, 0, width, -PI/1, PI/1));
rotateX(map(mouseY, 0, height, PI/1, -PI/1));
noStroke();
//strokeWeight(0.5);
int N=64;//角度分割数
float Ai=4*PI*gCT/N;
float R=20;
float L=85;
float Aj=asin(R*sin(Ai)/L);
float Yg=R*sin(Ai)/2;
float Xg=R*cos(Ai)+L*cos(Aj)/2;
float Xs=R*cos(Ai)+L*cos(Aj);
gCT++;if(gCT>N){gCT=0;}
scale(1.5,1.5,1.5);
rotateX(-90*PI/180);
pushMatrix();
translate(0,0,-Xs);
fill(60,100, 100,100);
P.Part2();//ピストン
popMatrix();
pushMatrix();
//translate(0,0,-62.5);
fill(40,50, 100,100);
translate(-Yg,0,-Xg);
rotateY(-Aj);
P.Part3();//リンク
popMatrix();
pushMatrix();
fill(70,20, 70,100);
rotateY(Ai);
P.Part4();//クランク
popMatrix();
pushMatrix();
fill(gCT/2,100,100,50);
translate(0,0,-(145+30+Xs)/2);
P.Z_Half_Circle(30,145-30-Xs);//燃焼ガス
popMatrix();
fill(50,80,40,70);
P.Part1();//シリンダ
}
//部品
class Part
{
void Part4()//クランク
{
pushMatrix();
rotateX(-90*PI/180);
pushMatrix();
translate(0,0,15);
Z_Bar(30,10);
translate(0,0,37.5);
Z_Bar(5,65);
popMatrix();
translate(0,20,0);
Z_Bar(5,20);
popMatrix();
}
void Part3()//リンク
{
int Pn=9;//ポイント数
float[] X={5,10,10,5,-5,-10,-10,-5,5,5.5};
float[] Y={52.5,47.5,-47.5,-52.5,-52.5,-47.5,47.5,52.5,52.5};
float L=10;
pushMatrix();
rotateX(90*PI/180);
Z_Side(Pn,X,Y,L);//側面
translate(0,0,-L/2);
Z_Polyon(Pn,X,Y);//多角形
translate(0,0,L);
Z_Polyon(Pn,X,Y);//多角形
popMatrix();
}
void Part2()//ピストン
{
pushMatrix();
rotateX(90*PI/180);
Z_Bar(5,60);
popMatrix();
pushMatrix();
translate(0,0,5);
Z_Half_Pipe(30,20,50);//Half_Pipe 半パイプ
translate(0,0,-30);
Z_Half_Circle(30,10);//Half_Circle 半円板
popMatrix();
}
void Part1()//シリンダ
{
pushMatrix();
translate(0,0,-2.5);
Z_Half_Pipe(50,40,75);//Half_Pipe 半パイプ
translate(0,0,-90);
Z_Half_Pipe(40,30,125);//Half_Pipe 半パイプ
translate(0,0,-57.5);
Z_Half_Circle(40,10);//Half_Circle 半円板
popMatrix();
pushMatrix();
//void Z_Pipe(float Ro,float Ri,float L)//パイプ
rotateX(90*PI/180);
translate(0,0,-40);
Z_Pipe(15,5,40);
popMatrix();
}
void Z_Half_Pipe(float R1,float R2,float L)//Half_Pipe 半パイプ
{
int Pn1=8;//R1,R2分割数
int Pn=2*Pn1+3;//全ポイント数
float[] X=new float[Pn];
float[] Y=new float[Pn];
int i;
float Ai;
for(i=0;i<=Pn1;i++)
{
Ai=i*PI/Pn1;
X[i]=R1*cos(Ai);
Y[i]=R1*sin(Ai);
}
for(i=0;i<=Pn1;i++)
{
Ai=PI-i*PI/Pn1;
X[i+Pn1+1]=R2*cos(Ai);
Y[i+Pn1+1]=R2*sin(Ai);
}
X[2*Pn1+2]=R1;Y[2*Pn1+2]=0;
pushMatrix();
Z_Side(Pn,X,Y,L);//側面
translate(0,0,-L/2);
Z_Polyon(Pn,X,Y);//多角形
translate(0,0,L);
Z_Polyon(Pn,X,Y);//多角形
popMatrix();
}
void Z_Half_Circle(float R1,float L)//Half_Circle 半円板
{
int Pn1=8;//R1分割数
int Pn=Pn1+2;//全ポイント数
float[] X=new float[Pn];
float[] Y=new float[Pn];
int i;
float Ai;
for(i=0;i<=Pn1;i++)
{
Ai=i*PI/Pn1;
X[i]=R1*cos(Ai);
Y[i]=R1*sin(Ai);
}
X[Pn1+1]=R1;Y[Pn1+1]=0;
pushMatrix();
Z_Side(Pn,X,Y,L);//側面
translate(0,0,-L/2);
Z_Polyon(Pn,X,Y);//多角形
translate(0,0,L);
Z_Polyon(Pn,X,Y);//多角形
popMatrix();
}
void Z_Bar(float R1,float L)//Bar 丸棒
{
int Pn1=16;//R1分割数
int Pn=Pn1+2;//全ポイント数
float[] X=new float[Pn];
float[] Y=new float[Pn];
int i;
float Ai;
for(i=0;i<=Pn1;i++)
{
Ai=i*2*PI/Pn1;
X[i]=R1*cos(Ai);
Y[i]=R1*sin(Ai);
}
X[Pn1+1]=R1;Y[Pn1+1]=0;
pushMatrix();
Z_Side(Pn,X,Y,L);//側面
translate(0,0,-L/2);
Z_Polyon(Pn,X,Y);//多角形
translate(0,0,L);
Z_Polyon(Pn,X,Y);//多角形
popMatrix();
}
void Z_Side(int Pn,float X[],float Y[],float L)//側面
{
int i;
beginShape(QUAD_STRIP);
for (i = 0; i < Pn; ++i)
{
vertex(X[i],Y[i], -L/2);
vertex(X[i],Y[i], L/2);
}
endShape(CLOSE);
}
void Z_Polyon(int Pn,float X[],float Y[])//多角形
{
int i;
beginShape();
for (i = 0; i < Pn; ++i)
{
vertex(X[i],Y[i]);
}
endShape(CLOSE);
}
void Z_Pipe(float Ro,float Ri,float L)//パイプ
{
pushMatrix();
Z_Cylinder(Ro,L);
Z_Cylinder(Ri,L);
translate(0,0,-L/2);
Z_Ring_2D(Ro,Ri);
translate(0,0,L);
Z_Ring_2D(Ro,Ri);
popMatrix();
}
void Z_Cylinder(float r,float L)//円筒
{
int sides=16;//分割数
int i;
beginShape(QUAD_STRIP);
for (i = 0; i < sides + 1; ++i)
{
float angle = i*TWO_PI/sides;
vertex(r*cos(angle), r*sin(angle), -L/2);
vertex(r*cos(angle), r*sin(angle), L/2);
}
endShape(CLOSE);
}
void Z_Ring_2D(float Ro,float Ri)
{
int sides=16;//分割数
int i;
beginShape();
for (i = 0; i < sides + 1; ++i)
{
float angle = i*TWO_PI/sides;
vertex(Ro*cos(angle), Ro*sin(angle),0);
}
beginContour();
for (i = 0; i < sides + 1; ++i)
{
float angle = -i*TWO_PI/sides;
vertex(Ri*cos(angle), Ri*sin(angle),0);
}
endContour();
endShape(CLOSE);
}
}
3Dサンプル(sketch_3D_Engin)エンジンテキストファイル3Dサンプル(sketch_3D_Engin)エンジンファイルは以下から参照できます。
 「33Dサンプル(sketch_3D_Engin)
エンジンテキストファイルファイル」にいく3Dサンプル(sketch_3D_Engin)エンジンまとめ
「33Dサンプル(sketch_3D_Engin)
エンジンテキストファイルファイル」にいく3Dサンプル(sketch_3D_Engin)エンジンまとめ(1)class Partで部品形状を定義しています。
(2)void draw()で画像を表示します。
(3)以下の計算式で部品の位置と角度を計算しています。
int N=64;//角度分割数
float Ai=4*PI*gCT/N;//クランクの回転角度
float R=20;//クランクの回転半径
float L=85;//リンクの回転軸間隔
float Aj=asin(R*sin(Ai)/L);//リンクの回転角
float Yg=R*sin(Ai)/2;//ンクの重心位置Y
float Xg=R*cos(Ai)+L*cos(Aj)/2;//ンクの重心位置X
float Xs=R*cos(Ai)+L*cos(Aj);//ピストンの位置
gCT++;if(gCT>N){gCT=0;}//クランクの回転角度変化用カウンタ
(4)各部品の動きを3D画像の変化で確認できます。