10章、16章、26章、27章の組合せとなります。
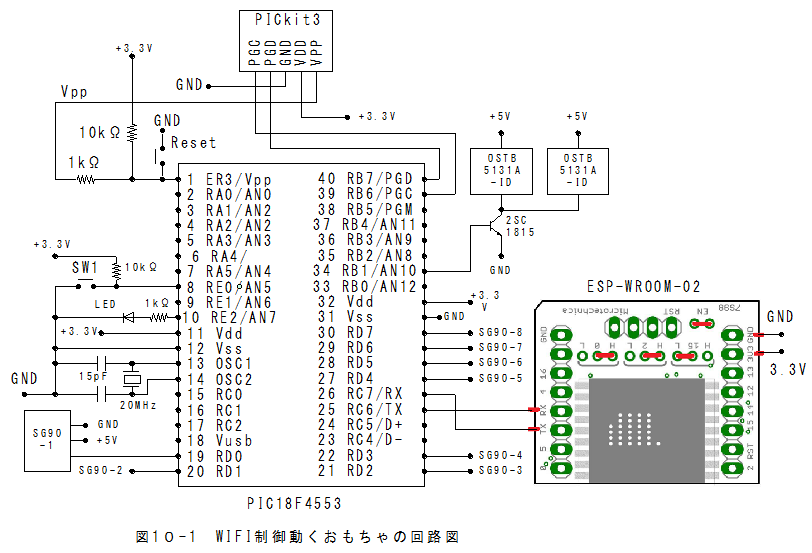
 WIFI制御動くおもちゃの回路図
WIFI制御動くおもちゃの回路図WIFI制御動くおもちゃの回路図を以下に示します。
 ブレークアウトボードのピン設定
ブレークアウトボードのピン設定(1)ENピン:(Chip Enable.)→Highに設定します。
(2)GPIO-15ピン:(Type I/O MTDO;HSPI_CS; UART0_RTS)→Lowに設定します。
(3)GPIO-2ピン:(Type I/O UART Tx during flash programming)→Highに設定します。
(4)GPIO-0ピン:(Type I/O SPI_CS2)→書込み時はLow、動作時はHighに設定します。
(5)TXピン:(Type I/O GPIO-1)→通信相手のRXに接続
(6)RXピン:(Type I/O GPIO-3)→通信相手のTXに接続
(7)3V3ピン:→3.3V電源供給
(8)GNDピン:→アース
と設定します。
WIFI制御動くおもちゃ外観WIFI制御動くおもちゃ外観を以下に示します。
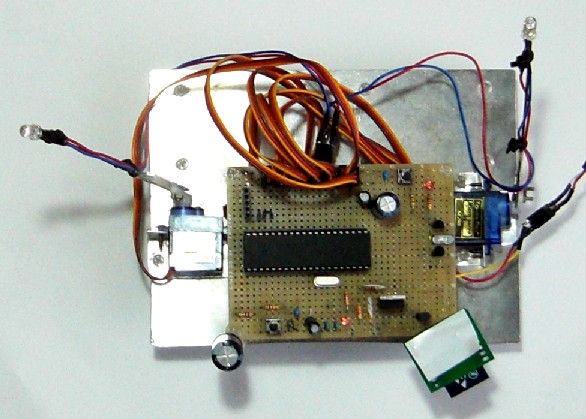
*簡単WiFi-UARTモジュール [ESP-WROOM-02]と2200μFコンデンサは外付けにしました。
おもちゃ部ESP-WROOM-02用スケッチおもちゃ部ESP-WROOM-02用スケッチは以下となります。
//WiFiClient 非同期
#include <ESP8266WiFi.h>
const char* ssid = "SSID";//無線LANのSSIDを設定します。
const char* password = "password";//無線LANのpasswordを設定します。
const char* host = "192.168.11.2";//パソコンのIPアドレスを設定します。
const int httpPort = 13000;//TCPサーバのポート
static String gSendText="";
void setup() {
Serial.begin(115200);//シリアルポートを115200bpsで開始
delay(10);
// We start by connecting to a WiFi network
Serial.println();
WiFi.begin(ssid, password);//無線LANに接続要求
while (WiFi.status() != WL_CONNECTED) {//接続完了まで待ちます。
delay(500);
Serial.print(".");
}
Serial.println("");
Serial.println("WiFi connected");
}
void loop()
{
delay(500);
// Use WiFiClient class to create TCP connections
WiFiClient client;
if (!client.connect(host, httpPort)) {//TCPサーバへの接続要求
//Serial.print("x");
}
else
{
if(gSendText.length() > 1)
{
client.print(gSendText);//データを送信
gSendText="";
}
else{client.print("a");}//"a"を送信
delay(10);
// Read all the lines of the reply from server and print them to Serial
while(client.available())
{
String line = client.readStringUntil('\n');//受信します。
Serial.print(line+"\r\n");
gSendText=line + "=OK\r\n";//送信データのセット
}
}
}
おもちゃ部ESP-WROOM-02用スケッチテキストファイルおもちゃ部ESP-WROOM-02用スケッチテキストファイルは以下から参照できます。
 「おもちゃ部ESP-WROOM-02用スケッチテキストファイル」にいくおもちゃ部PIC18F4553用ソースプログラム
「おもちゃ部ESP-WROOM-02用スケッチテキストファイル」にいくおもちゃ部PIC18F4553用ソースプログラムおもちゃ部PIC18F4553用ソースプログラムは以下となります。
//WIFI動くおもちゃソースプログラム
#include <xc.h>
#pragma config PLLDIV = 5 // (20 MHz crystal on PICDEM FS USB board)
#pragma config CPUDIV = OSC1_PLL2
#pragma config USBDIV = 2 // Clock source from 96MHz PLL/2
#pragma config FOSC = HSPLL_HS
#pragma config FCMEN = OFF
#pragma config IESO = OFF
#pragma config PWRT = OFF
#pragma config BOR = ON
#pragma config BORV = 3
#pragma config VREGEN = ON //USB Voltage Regulator
#pragma config WDT = OFF
#pragma config WDTPS = 32768
#pragma config MCLRE = ON
#pragma config LPT1OSC = OFF
#pragma config PBADEN = OFF
//#pragma config CCP2MX = ON
#pragma config STVREN = ON
#pragma config LVP = OFF
//#pragma config ICPRT = OFF // Dedicated In-Circuit Debug/Programming
#pragma config XINST = OFF // Extended Instruction Set
#pragma config CP0 = OFF
#pragma config CP1 = OFF
//#pragma config CP2 = OFF
//#pragma config CP3 = OFF
#pragma config CPB = OFF
//#pragma config CPD = OFF
#pragma config WRT0 = OFF
#pragma config WRT1 = OFF
//#pragma config WRT2 = OFF
//#pragma config WRT3 = OFF
#pragma config WRTB = OFF // Boot Block Write Protection
#pragma config WRTC = OFF
//#pragma config WRTD = OFF
#pragma config EBTR0 = OFF
#pragma config EBTR1 = OFF
//#pragma config EBTR2 = OFF
//#pragma config EBTR3 = OFF
#pragma config EBTRB = OFF
#define _XTAL_FREQ 48000000 //__delay_ms
#define SW1 PORTEbits.RE0
#define SW2 PORTEbits.RE1
#define LED PORTEbits.RE2
void init(void);
char UART_Init(const long int baudrate);
void UART_Write(char data);
char UART_TX_Empty();
void UART_Write_Text(char *text);
char UART_Data_Ready();
char UART_Read();
void UART_Read_Text(char *Output, unsigned int length);
void UARTreadTEXT_1();
void UARTreadTEXT_2();
void MyWait(int iT);
void MyWait_2(int iT);
void RUN1(void);
void RUN2(void);
void RUN3(void);
void RUN4(void);
//int n;
char UARTreadBuffer[256];//バッファ
char gN=0;//受信文字数
char gChar;//コマンド
void init(void)
{
ADCON1 = 0b00001111;
TRISA = 0b00000000;
TRISB = 0b00000000;
TRISC = 0b00110000; //D-,D+
TRISD = 0b00000000;
TRISE = 0b00000011; //SW1,2=INPUT LED=OUTPUT
LATA = 0b00000000;
LATB = 0b00000000;
LATC = 0b00000000;
LATD = 0b00000000;
LATE = 0b00000000;
}
void main(void)
{
init();//初期設定
UART_Init(115200);//UART初期設定、ボーレイト設定
//割り込み使用時は以下を有効にします。
RCIF = 0; //reset RX pin flag
RCIP = 1; //high priority
RCIE = 1; //Enable RX interrupt
PEIE = 1; //Enable pheripheral interrupt (serial port is a pheripheral)
INTCONbits.GIE = 1;//Global Interrupt Enable bit
int i;
LED=0;
int i,j;
PORTBbits.RB1=1;
for ( i = 0; i < 10; i++ )
{
PORTDbits.RD0=1;
PORTDbits.RD1=1;
PORTDbits.RD2=1;
PORTDbits.RD3=1;
PORTDbits.RD4=1;
PORTDbits.RD5=1;
PORTDbits.RD6=1;
PORTDbits.RD7=1;
__delay_ms( 1 );
__delay_us( 500 );
PORTDbits.RD0=0;
PORTDbits.RD1=0;
PORTDbits.RD2=0;
PORTDbits.RD3=0;
PORTDbits.RD4=0;
PORTDbits.RD5=0;
PORTDbits.RD6=0;
PORTDbits.RD7=0;
for ( j = 0; j < 2; j++ )__delay_ms( 10 );
}
while(1)
{
LED=1;
MyWait_2(200);
UARTreadTEXT_2();
switch (gChar)
{
case '1':
UART_Write_Text("BT1=RUN\r\n");
RUN1();
break;
case '2':
UART_Write_Text("BT2=RUN\r\n");
RUN2();
break;
case '3':
UART_Write_Text("BT3=RUN\r\n");
RUN3();
break;
case '4':
UART_Write_Text("BT4=RUN\r\n");
RUN4();
break;
default:
break;
}
}//end while
}
void interrupt SYS_InterruptHigh(void)
{
if(PIR1bits.RCIF == 1)
{
UARTreadBuffer[gN] = UART_Read();
gN++;
//PIR1bits.RCIF=0;
//LED=1;
}
}
char UART_Init(const long int baudrate)
{
unsigned int x;
BRGH = 1; //Setting High Baud Rate
x = (_XTAL_FREQ - baudrate*16)/(baudrate*16); //SPBRG for High Baud Rate
if(x>255) //If High Baud Rage Required
{
BRGH = 0;
x = (_XTAL_FREQ - baudrate*64)/(baudrate*64); //SPBRG for Low Baud Rate
}
if(x<256)
{
SPBRG = x; //Writing SPBRG Register
SYNC = 0; //Setting Asynchronous Mode, ie UART
SPEN = 1; //Enables Serial Port
TRISC7 = 1; //As Prescribed in Datasheet
TRISC6 = 1; //As Prescribed in Datasheet
CREN = 1; //Enables Continuous Reception
TXEN = 1; //Enables Transmission
return 1; //Returns 1 to indicate Successful Completion
}
return 0; //Returns 0 to indicate UART initialization failed
}
void UART_Write(char data)
{
while(!TRMT);
TXREG = data;
}
char UART_TX_Empty()
{
return TRMT;
}
void UART_Write_Text(char *text)
{
int i;
for(i=0;text[i]!='\0';i++)
UART_Write(text[i]);
}
char UART_Data_Ready()
{
return RCIF;
}
char UART_Read()
{
while(!RCIF);
return RCREG;
}
void UART_Read_Text(char *Output, unsigned int length)
{
unsigned int i;
for(int i=0;i<length;i++)
Output[i] = UART_Read();
}
void MyWait(int iT)
{
int i,ii;
for(ii=1;ii<iT;ii++)
{
__delay_ms(10);
if(gN>=1)
{
for(i=1;i<gN;i++)
{
if(UARTreadBuffer[i-1]=='O' && UARTreadBuffer[i]=='K')
{
__delay_ms(5);
return;
}
}
}
}
}
void MyWait_2(int iT)
{
int i,ii;
for(ii=1;ii<iT;ii++)
{
__delay_ms(10);
if(gN>=1)
{
for(i=1;i<gN;i++)
{
if(UARTreadBuffer[i-1]=='B' && UARTreadBuffer[i]=='T')
{
gChar=UARTreadBuffer[i+1];
__delay_ms(5);
return;
}
}
}
}
}
void UARTreadTEXT_1()
{
int i;
char Buffer[256];
if(gN>=1)
{
char iN=gN;
gN=0;
for(i=0;i<iN;i++)
{
Buffer[i]=UARTreadBuffer[i];
}
}
int test=0;
}
void UARTreadTEXT_2()
{
int i;
char Buffer[256];
if(gN>=1)
{
char iN=gN;
gN=0;
for(i=0;i<iN;i++)
{
Buffer[i]=UARTreadBuffer[i];
}
Buffer[iN]=0x00;
UART_Write_Text(Buffer);
}
}
void RUN1(void)
{
int i;
for ( i = 0; i < 20; i++ )
{
PORTDbits.RD3=1;
PORTDbits.RD4=1;
PORTDbits.RD5=1;
__delay_ms( 1 );
PORTDbits.RD3=0;
__delay_ms( 1 );
PORTDbits.RD4=0;
PORTDbits.RD5=0;
__delay_ms( 10 );
}
for ( i = 0; i < 30; i++ ){__delay_ms( 10 );}
for ( i = 0; i < 20; i++ )
{
PORTDbits.RD0=1;
PORTDbits.RD1=1;
PORTDbits.RD2=1;
__delay_ms( 1 );
PORTDbits.RD0=0;
PORTDbits.RD2=0;
__delay_ms( 1 );
PORTDbits.RD1=0;
__delay_ms( 10 );
}
for ( i = 0; i < 20; i++ )
{
PORTDbits.RD3=1;
PORTDbits.RD4=1;
PORTDbits.RD5=1;
__delay_ms( 1 );
PORTDbits.RD4=0;
PORTDbits.RD5=0;
__delay_ms( 1 );
PORTDbits.RD3=0;
__delay_ms( 10 );
}
for ( i = 0; i < 30; i++ ){__delay_ms( 10 );}
for ( i = 0; i < 20; i++ )
{
PORTDbits.RD0=1;
PORTDbits.RD1=1;
PORTDbits.RD2=1;
__delay_ms( 1 );
PORTDbits.RD1=0;
__delay_ms( 1 );
PORTDbits.RD0=0;
PORTDbits.RD2=0;
__delay_ms( 10 );
}
}
void RUN2(void)
{
int i;
for ( i = 0; i < 30; i++ )
{
PORTDbits.RD3=1;
PORTDbits.RD4=1;
PORTDbits.RD5=1;
__delay_ms( 1 );
PORTDbits.RD3=0;
__delay_ms( 1 );
PORTDbits.RD4=0;
PORTDbits.RD5=0;
__delay_ms( 10 );
}
for ( i = 0; i < 30; i++ ){__delay_ms( 10 );}
for ( i = 0; i < 30; i++ )
{
PORTDbits.RD0=1;
PORTDbits.RD1=1;
PORTDbits.RD2=1;
__delay_ms( 1 );
PORTDbits.RD1=0;
__delay_ms( 1 );
PORTDbits.RD0=0;
PORTDbits.RD2=0;
__delay_ms( 10 );
}
for ( i = 0; i < 30; i++ )
{
PORTDbits.RD3=1;
PORTDbits.RD4=1;
PORTDbits.RD5=1;
__delay_ms( 1 );
PORTDbits.RD4=0;
PORTDbits.RD5=0;
__delay_ms( 1 );
PORTDbits.RD3=0;
__delay_ms( 10 );
}
for ( i = 0; i < 30; i++ ){__delay_ms( 10 );}
for ( i = 0; i < 30; i++ )
{
PORTDbits.RD0=1;
PORTDbits.RD1=1;
PORTDbits.RD2=1;
__delay_ms( 1 );
PORTDbits.RD0=0;
PORTDbits.RD2=0;
__delay_ms( 1 );
PORTDbits.RD1=0;
__delay_ms( 10 );
}
}
void RUN3(void)
{
int i,j;
for ( i = 0; i < 3; i++ )
{
PORTDbits.RD6=1;
PORTDbits.RD7=1;
__delay_ms( 1 );
PORTDbits.RD6=0;
__delay_ms( 1 );
PORTDbits.RD7=0;
for ( j = 0; j < 5; j++ )__delay_ms( 10 );
}
for ( i = 0; i < 5; i++ )
{
PORTDbits.RD6=1;
PORTDbits.RD7=1;
__delay_ms( 1 );
__delay_us( 500 );
PORTDbits.RD6=0;
PORTDbits.RD7=0;
for ( j = 0; j < 5; j++ )__delay_ms( 10 );
}
for ( i = 0; i < 3; i++ )
{
PORTDbits.RD6=1;
PORTDbits.RD7=1;
__delay_ms( 1 );
PORTDbits.RD7=0;
__delay_ms( 1 );
PORTDbits.RD6=0;
for ( j = 0; j < 5; j++ )__delay_ms( 10 );
}
for ( i = 0; i < 5; i++ )
{
PORTDbits.RD6=1;
PORTDbits.RD7=1;
__delay_ms( 1 );
__delay_us( 500 );
PORTDbits.RD6=0;
PORTDbits.RD7=0;
for ( j = 0; j < 5; j++ )__delay_ms( 10 );
}
}
void RUN4(void)
{
int i,j;
for ( i = 0; i < 3; i++ )
{
PORTDbits.RD6=1;
PORTDbits.RD7=1;
__delay_ms( 1 );
__delay_ms( 1 );
PORTDbits.RD7=0;
PORTDbits.RD6=0;
for ( j = 0; j < 5; j++ )__delay_ms( 10 );
}
for ( i = 0; i < 5; i++ )
{
PORTDbits.RD6=1;
PORTDbits.RD7=1;
__delay_ms( 1 );
__delay_us( 500 );
PORTDbits.RD6=0;
PORTDbits.RD7=0;
for ( j = 0; j < 5; j++ )__delay_ms( 10 );
}
for ( i = 0; i < 3; i++ )
{
PORTDbits.RD6=1;
PORTDbits.RD7=1;
__delay_ms( 1 );
PORTDbits.RD6=0;
PORTDbits.RD7=0;
__delay_ms( 1 );
for ( j = 0; j < 5; j++ )__delay_ms( 10 );
}
for ( i = 0; i < 5; i++ )
{
PORTDbits.RD6=1;
PORTDbits.RD7=1;
__delay_ms( 1 );
__delay_us( 500 );
PORTDbits.RD6=0;
PORTDbits.RD7=0;
for ( j = 0; j < 5; j++ )__delay_ms( 10 );
}
}
おもちゃ部PIC18F4553用ソースプログラムテキストファイルおもちゃ部PIC18F4553用ソースプログラムテキストファイルは以下から参照できます。
「おもちゃ部PIC18F4553用ソースプログラムテキストファイル」にいくコントローラーの回路図コントローラーの回路図を以下に示します。
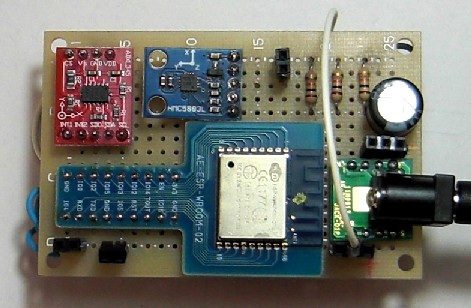
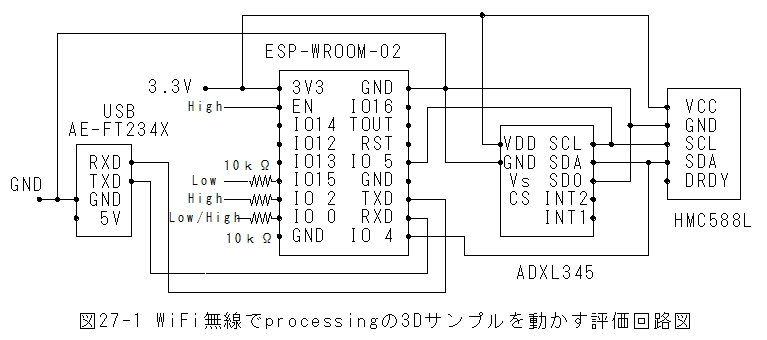 コントローラー外観
コントローラー外観(1)スケッチ書込み時の外観を以下に示します。
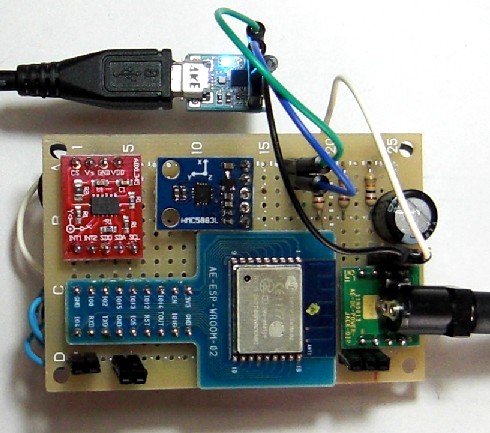
(2)使用時はUSB変換器を外します。
 コントローラー部ESP-WROOM-02用スケッチ
コントローラー部ESP-WROOM-02用スケッチコントローラー部ESP-WROOM-02用スケッチは以下となります。
//ADDXL345_HMC5883 27章WiFi無線でprocessingの3Dサンプルを動かす
#include <Wire.h>
#include <Adafruit_Sensor.h>
#include <Adafruit_ADXL345_U.h>
#include <stdio.h>
//WiFiClient 非同期
#include <ESP8266WiFi.h>
const char* ssid = "SSID";//無線LANのSSIDを設定します。
const char* password = "password";//無線LANのpasswordを設定します。
const char* host = "192.168.11.2";//パソコンのIPアドレスを設定します。
const int httpPort = 13000;//TCPサーバのポート
static String gSendText="";
/* Assign a unique ID to this sensor at the same time */
Adafruit_ADXL345_Unified accel = Adafruit_ADXL345_Unified(12345);
#include <Adafruit_HMC5883_U.h>
Adafruit_HMC5883_Unified mag = Adafruit_HMC5883_Unified(12345);
void displaySensorDetails(void)
{
sensor_t sensor;
accel.getSensor(&sensor);
Serial.println("------------------------------------");
Serial.print ("Sensor: "); Serial.println(sensor.name);
Serial.print ("Driver Ver: "); Serial.println(sensor.version);
Serial.print ("Unique ID: "); Serial.println(sensor.sensor_id);
Serial.print ("Max Value: "); Serial.print(sensor.max_value); Serial.println(" m/s^2");
Serial.print ("Min Value: "); Serial.print(sensor.min_value); Serial.println(" m/s^2");
Serial.print ("Resolution: "); Serial.print(sensor.resolution); Serial.println(" m/s^2");
Serial.println("------------------------------------");
Serial.println("");
delay(500);
}
void displayDataRate(void)
{
Serial.print ("Data Rate: ");
switch(accel.getDataRate())
{
case ADXL345_DATARATE_3200_HZ:
Serial.print ("3200 ");
break;
case ADXL345_DATARATE_1600_HZ:
Serial.print ("1600 ");
break;
case ADXL345_DATARATE_800_HZ:
Serial.print ("800 ");
break;
case ADXL345_DATARATE_400_HZ:
Serial.print ("400 ");
break;
case ADXL345_DATARATE_200_HZ:
Serial.print ("200 ");
break;
case ADXL345_DATARATE_100_HZ:
Serial.print ("100 ");
break;
case ADXL345_DATARATE_50_HZ:
Serial.print ("50 ");
break;
case ADXL345_DATARATE_25_HZ:
Serial.print ("25 ");
break;
case ADXL345_DATARATE_12_5_HZ:
Serial.print ("12.5 ");
break;
case ADXL345_DATARATE_6_25HZ:
Serial.print ("6.25 ");
break;
case ADXL345_DATARATE_3_13_HZ:
Serial.print ("3.13 ");
break;
case ADXL345_DATARATE_1_56_HZ:
Serial.print ("1.56 ");
break;
case ADXL345_DATARATE_0_78_HZ:
Serial.print ("0.78 ");
break;
case ADXL345_DATARATE_0_39_HZ:
Serial.print ("0.39 ");
break;
case ADXL345_DATARATE_0_20_HZ:
Serial.print ("0.20 ");
break;
case ADXL345_DATARATE_0_10_HZ:
Serial.print ("0.10 ");
break;
default:
Serial.print ("???? ");
break;
}
Serial.println(" Hz");
}
void displayRange(void)
{
Serial.print ("Range: +/- ");
switch(accel.getRange())
{
case ADXL345_RANGE_16_G:
Serial.print ("16 ");
break;
case ADXL345_RANGE_8_G:
Serial.print ("8 ");
break;
case ADXL345_RANGE_4_G:
Serial.print ("4 ");
break;
case ADXL345_RANGE_2_G:
Serial.print ("2 ");
break;
default:
Serial.print ("?? ");
break;
}
Serial.println(" g");
}
void setup(void)
{
Serial.begin(115200);
Serial.println("Accelerometer Test"); Serial.println("");
/* Initialise the sensor */
if(!accel.begin())
{
/* There was a problem detecting the ADXL345 ... check your connections */
Serial.println("Ooops, no ADXL345 detected ... Check your wiring!");
while(1);
}
/* Set the range to whatever is appropriate for your project */
accel.setRange(ADXL345_RANGE_16_G);
//displaySetRange(ADXL345_RANGE_8_G);
//displaySetRange(ADXL345_RANGE_4_G);
//displaySetRange(ADXL345_RANGE_2_G);
/* Display some basic information on this sensor */
displaySensorDetails();
/* Display additional settings (outside the scope of sensor_t) */
displayDataRate();
displayRange();
Serial.println("");
if(!mag.begin())
{
//Serial.println("Ooops, no HMC5883 detected ... Check your wiring!");
while(1);
}
WiFi.begin(ssid, password);//無線LANに接続要求
while (WiFi.status() != WL_CONNECTED) {//接続完了まで待ちます。
delay(500);
Serial.print(".");
}
Serial.println("");
Serial.println("WiFi connected");
}
void loop(void)
{
/* Get a new sensor event */
sensors_event_t event;
accel.getEvent(&event);
sensors_event_t event2;
mag.getEvent(&event2);
int Xd=(int)(1000*event.acceleration.x);
int Yd=(int)(1000*event.acceleration.y);
int Zd=(int)(1000*event.acceleration.z);
int Mx=(int)(100*event2.magnetic.x);
int My=(int)(100*event2.magnetic.y);
int Mz=(int)(100*event2.magnetic.z);
char str[256];
sprintf(str,"%d,%d,%d,%d,%d,%d\r\n",Xd,Yd,Zd,Mx,My,Mz);
//Serial.print(str);
/* Display the results (acceleration is measured in m/s^2) */
//Serial.print("X: "); Serial.print(Xd); Serial.print(",");
//Serial.print("Y: "); Serial.print(Yd); Serial.print(",");
//Serial.print("Z: "); Serial.print(Zd); Serial.print(",");
//Serial.print("Mx: "); Serial.print(Mx); Serial.print(",");
//Serial.print("My: "); Serial.print(My); Serial.print(",");
//Serial.print("Mz: "); Serial.print(Mz); Serial.print(",");
delay(200);
// Use WiFiClient class to create TCP connections
WiFiClient client;
if (client.connect(host, httpPort))
{
client.print(str);
}
}
コントローラー部ESP-WROOM-02用スケッチテキストファイルコントローラー部ESP-WROOM-02用スケッチテキストファイルは以下から参照できます。
「コントローラー部ESP-WROOM-02用スケッチテキストファイル」にいくprocessing用スケッチprocessing用スケッチは以下となります。
//TCP_Server_ADXL345_HMC5883_2 27章WiFi無線でprocessingの3Dサンプルを動かす
import processing.net.*;
int port = 13000;
boolean myServerRunning = true;
Server myServer;
import processing.serial.*;
Serial myPort; // The serial port
float Mx=0;
float My=0;
float Mz=0;
int gC=0;int gF=0;int gN=20;
int[] Ax=new int[gN+1];
int[] Ay=new int[gN+1];
int[] Az=new int[gN+1];
float Dx=0,Dy=0,Dz=0;
int gC0=0,gCmax=4;
float Dxnew=0,Dynew=0,Dznew=0,Dxold,Dyold,Dzold;
float Mxnew=0,Mynew=0,Mznew=0,Mxold,Myold,Mzold;
int gM=0;
void setup ()
{
size(740, 660, P3D);
myServer = new Server(this, port); // Starts a myServer on port 13000
}
void draw ()
{
int i;
int Sx=0,Sy=0,Sz=0;
background(0, 256, 256);
Client thisClient = myServer.available();
if (thisClient != null)
{
if (thisClient.available() > 0)
{
String myString =thisClient.readString();
myString = trim(myString);
int sensors[] = int(split(myString, ','));
int sensorNum;
for (sensorNum = 0; sensorNum < sensors.length; sensorNum++)
{
print(sensors[sensorNum] + "\t");
}
println();
int f;
if(sensorNum==6){f=1;}
else
{
f=0;
thisClient.write("BT"+gM+"\r\n");
}
if(f==1)
{
Mxold=Mxnew;Mxnew=atan2(sensors[0],sensors[2]);
Myold=Mynew;Mynew=atan2(sensors[1],sensors[2]);
Mzold=Mznew;Mznew=atan2(sensors[4],sensors[3]);
if(abs(Mxnew)>abs(Mynew))
{
if(abs(Mxnew)<0.2)
{gM=0;}
else
{
if(abs(Mxnew)<0.4)
{gM=3;}
else{gM=1;}
}
}
else
{
if(abs(Mynew)<0.2)
{gM=0;}
else
{
if(abs(Mynew)<0.4)
{gM=4;}
else{gM=2;}
}
}
Ax[gC]=sensors[0];
Ay[gC]=sensors[1];
Az[gC]=sensors[2];
if(gF==1)
{
for(i=0;i<gN;i++)
{
Sx=Sx+Ax[i];
Sy=Sy+Ay[i];
Sz=Sz+Az[i];
}
Dxold=Dxnew;Dxnew=0.1*(Ax[gC]-Sx/gN);
Dyold=Dynew;Dynew=0.1*(Ay[gC]-Sy/gN);
Dzold=Dznew;Dznew=0.1*(Az[gC]-Sz/gN);
}
gC++;
if(gC > gN)
{gF=1;gC=0;}
gCmax=gC0;
gC0=0;
}
}
}
if(gF==1)
{
Mx=Mxold+(Mxnew-Mxold)*gC0/gCmax;
My=Myold+(Mynew-Myold)*gC0/gCmax;
Mz=Mzold+(Mznew-Mzold)*gC0/gCmax;
Dx=Dxold+(Dxnew-Dxold)*gC0/gCmax;
Dy=Dyold+(Dynew-Dyold)*gC0/gCmax;
Dz=Dzold+(Dznew-Dzold)*gC0/gCmax;
println(Mx+" " +My +" " +Mz+" "+Dx+" " +Dy +" " +Dz);
}
gC0++;
lights();
translate(width / 2, height / 2,-200);
rotateX(Mx);
rotateY(Mz);
rotateZ(My);
noStroke();
fill(240, 240, 230);
translate(0,0,100);
translate(Dx,Dz,Dy);
OB_A2();//Z軸回転体(胴体)
OB_A3();//Z軸回転体(胴体先端)
OB2();//主翼
OB3();//水平尾翼
OB4();//垂直尾翼
OB_A4();//Z軸回転体(エンジン)
}
void OB_A4()//Z軸回転体(エンジン)
{
int sides=16;//分割数
int Sn=6;//面数
float Pz[]={0,-1,-50,-60,-70,-70};//z座標
float R[]={15,20,20,15,15,1};//回転物半径
int i,j;
float angleIncrement = TWO_PI/sides;
pushMatrix();
translate(60, 36.3,-145);
for(j=0;j<Sn-1;j++)
{
float angle = 0;
beginShape(QUAD_STRIP);
for (i = 0; i < sides + 1; ++i)
{
vertex(R[j]*cos(angle), R[j]*sin(angle), Pz[j]);
vertex(R[j+1]*cos(angle), R[j+1]*sin(angle), Pz[j+1]);
angle += angleIncrement;
}
endShape(CLOSE);
}
popMatrix();
pushMatrix();
translate(-60, 36.3,-145);
for(j=0;j<Sn-1;j++)
{
float angle = 0;
beginShape(QUAD_STRIP);
for (i = 0; i < sides + 1; ++i)
{
vertex(R[j]*cos(angle), R[j]*sin(angle), Pz[j]);
vertex(R[j+1]*cos(angle), R[j+1]*sin(angle), Pz[j+1]);
angle += angleIncrement;
}
endShape(CLOSE);
}
popMatrix();
}
void OB4()//垂直尾翼
{
float Px[]={0,0,3,-3,0,0,2,-2};//ポイントx
float Py[]={0,0,0,0,-80,-80,-80,-80};//ポイントy
float Pz[]={25,-25,0,0,0,-25,-15,-15};//ポイントz
int Sn=10;//面数
int S1[]={0,0,1,1,0,0,1,1,4,5};//面ポイント1
int S2[]={2,4,2,5,3,4,3,5,6,6};//面ポイント2
int S3[]={6,6,5,6,7,7,7,7,7,7};//面ポイント3
int i;
pushMatrix();
translate(0, 0,-395);
for(i=0;i<Sn;i++)
{
beginShape();
vertex(Px[S1[i]], Py[S1[i]],Pz[S1[i]]);
vertex(Px[S2[i]], Py[S2[i]],Pz[S2[i]]);
vertex(Px[S3[i]], Py[S3[i]],Pz[S3[i]]);
endShape(CLOSE);
}
popMatrix();
}
void OB3()//水平尾翼
{
float Px[]={0,0,0,100,100,100};//ポイントx
float Py[]={3,3,-3,2,2,-2};//ポイントy
float Pz[]={15,-15,0,-5,-15,-10};//ポイントz
int Sn=7;//面数
int S1[]={0,0,0,0,1,1,3};//面ポイント1
int S2[]={1,3,2,3,2,4,4};//面ポイント2
int S3[]={4,4,5,5,5,5,5};//面ポイント3
int i;
pushMatrix();
translate(0, 0,-415);
for(i=0;i<Sn;i++)
{
beginShape();
vertex(Px[S1[i]], Py[S1[i]],Pz[S1[i]]);
vertex(Px[S2[i]], Py[S2[i]],Pz[S2[i]]);
vertex(Px[S3[i]], Py[S3[i]],Pz[S3[i]]);
endShape(CLOSE);
}
for(i=0;i<Sn;i++)
{
beginShape();
vertex(-Px[S1[i]], Py[S1[i]],Pz[S1[i]]);
vertex(-Px[S2[i]], Py[S2[i]],Pz[S2[i]]);
vertex(-Px[S3[i]], Py[S3[i]],Pz[S3[i]]);
endShape(CLOSE);
}
popMatrix();
}
void OB2()//主翼
{
float Px[]={10,10,10,220,220,220};//ポイントx
float Py[]={20,20,10,15,15,10};//ポイントy
float Pz[]={40,-40,0,10,-10,0};//ポイントz
int Sn=7;//面数
int S1[]={0,0,0,0,1,1,3};//面ポイント1
int S2[]={1,3,2,3,2,4,4};//面ポイント2
int S3[]={4,4,5,5,5,5,5};//面ポイント3
int i;
pushMatrix();
translate(0, 0,-200);
for(i=0;i<Sn;i++)
{
beginShape();
vertex(Px[S1[i]], Py[S1[i]],Pz[S1[i]]);
vertex(Px[S2[i]], Py[S2[i]],Pz[S2[i]]);
vertex(Px[S3[i]], Py[S3[i]],Pz[S3[i]]);
endShape(CLOSE);
}
for(i=0;i<Sn;i++)
{
beginShape();
vertex(-Px[S1[i]], Py[S1[i]],Pz[S1[i]]);
vertex(-Px[S2[i]], Py[S2[i]],Pz[S2[i]]);
vertex(-Px[S3[i]], Py[S3[i]],Pz[S3[i]]);
endShape(CLOSE);
}
popMatrix();
}
void OB_A3()//Z軸回転体(胴体先端)
{
int sides=16;//分割数
int Sn=8;//面数
float Pz[]={0,-3.2,-11.7,-21.8,-31.9,-45.3,-70.2,-129.4};//z座標
float R[]={0.1,3.7,7.4,9.6,11.8,13.8,17.4,17.7};//回転物半径
int i,j;
float angleIncrement = TWO_PI/sides;
pushMatrix();
translate(0, 8.5);
for(j=0;j<Sn-1;j++)
{
float angle = 0;
beginShape(QUAD_STRIP);
for (i = 0; i < sides + 1; ++i)
{
vertex(R[j]*cos(angle), R[j]*sin(angle), Pz[j]);
vertex(R[j+1]*cos(angle), R[j+1]*sin(angle), Pz[j+1]);
angle += angleIncrement;
}
endShape(CLOSE);
}
popMatrix();
}
void OB_A2()//Z軸回転体(胴体)
{
int sides=16;//分割数
int Sn=13;//面数
float Pz[]={-40,-46.9,-68.4,-88.2,-108.8,-129.4,-319.4,-346.2,-373,-391.2,-409.4,-433,-440};//z座標
float R[]={0.1,7.8,15.4,19.5,22.3,25,25,22.3,18.7,16,13.3,8.3,0.1};//回転物半径
int i,j;
float angleIncrement = TWO_PI/sides;
for(j=0;j<Sn-1;j++)
{
float angle = 0;
beginShape(QUAD_STRIP);
for (i = 0; i < sides + 1; ++i)
{
fill(240, 240, 230);
if(j==1){fill(20, 20, 40);}
if(j==5 && i==0){fill(20, 20, 40);}
if(j==5 && i==8){fill(20, 20, 40);}
if(j==5 && i==16){fill(20, 20, 40);}
vertex(R[j]*cos(angle), R[j]*sin(angle), Pz[j]);
vertex(R[j+1]*cos(angle), R[j+1]*sin(angle), Pz[j+1]);
angle += angleIncrement;
}
endShape(CLOSE);
}
}
processing用スケッチテキストファイルprocessing用スケッチテキストファイルは以下から参照できます。
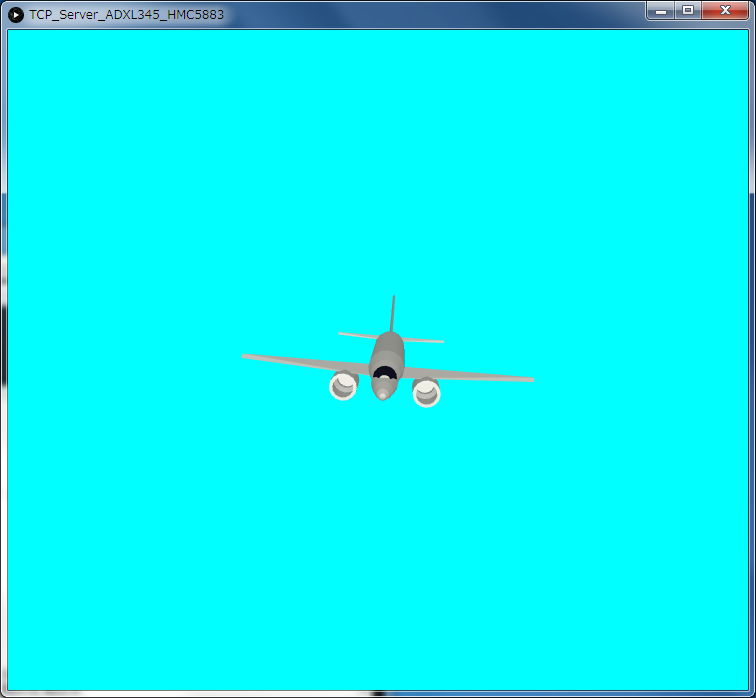
「processing用スケッチテキストファイル」にいく動作試験(1)processing用スケッチをRunします。
(2)動くおもちゃの電源を投入します。
(3)コントローラーの電源を投入します
(4)ESP-WROOM-02を動かすと3D画像の3軸方向回転と3軸方向位置が変化します。
(5)連動して動くおもちゃが動作します。
 WiFi無線とprocessingでおもちゃを動かすまとめ
WiFi無線とprocessingでおもちゃを動かすまとめ(1)10章、16章、26章、27章の組合せとなります。
(2)全体では複雑ですが、個々の要素の動作は既に確認済みです。
(3)コントローラの信号をWiFi無線でprocessingに送信します。
(4)processingから動くおもちゃに駆動指令をWiFi無線で送信します。
(5)駆動指令に基づいてくおもちゃが動作します。
(6)さらに複雑な組合せも可能です。