 TCPサーバ使用でAE-USBPIC44基板 からトランスペアレントモード起動
TCPサーバ使用でAE-USBPIC44基板 からトランスペアレントモード起動まずは、USBで通信内容が確認できるモードで動作テストします。
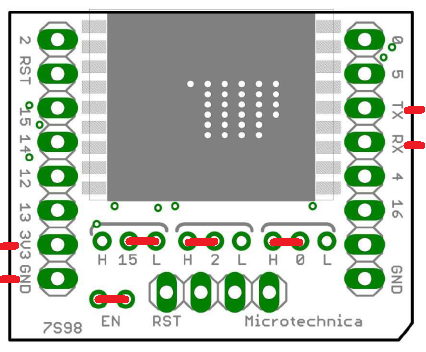
ブレークアウトボードのピン設定(1)ENピン:(Chip Enable.)→Highに設定します。
(2)GPIO-15ピン:(Type I/O MTDO;HSPI_CS; UART0_RTS)→Lowに設定します。
(3)GPIO-2ピン:(Type I/O UART Tx during flash programming)→Highに設定します。
(4)GPIO-0ピン:(Type I/O SPI_CS2)→Highに設定します。
(5)TXピン:(Type I/O GPIO-1)→通信相手のRXに接続
(6)RXピン:(Type I/O GPIO-3)→通信相手のTXに接続
(7)3V3ピン:→3.3V電源供給
(8)GNDピン:→アース
と設定します。
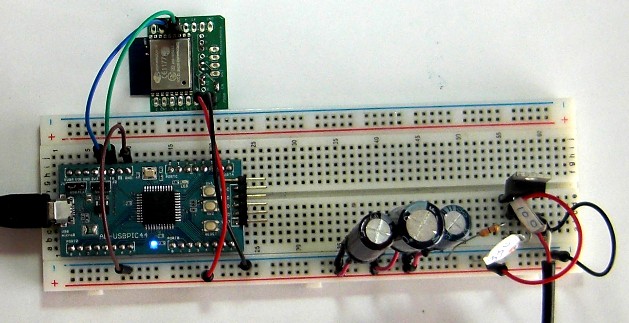
 評価回路外観
評価回路外観評価回路外観を以下に示します。
 USBによる通信内容確認モードのソースプログラム
USBによる通信内容確認モードのソースプログラムAE-USBPIC44基板用のソースプログラムは以下からダウンロードできます。
 [3-1.zip]をダウンロードする。
[3-1.zip]をダウンロードする。解凍するとMy-CDC-Basic-Mホルダー内にMy-CDC-Basic.Xフォルダーがあります。
USBによる通信内容確認モードのソースプログラムの修正以下のコードに「SSID」「パスワード」「パソコンIPアドレス」「ポート」を設定します。
MAIN_RETURN main(void)
{
ADCON1 = 0b00001111;
TRISA = 0b00000000;
TRISB = 0b00000000;
TRISC = 0b00110000; //D-,D+
TRISD = 0b00000000;
TRISE = 0b11000011; //SW1,2=INPUT LED=OUTPUT
LATA = 0b00000000;
LATB = 0b00000000;
LATC = 0b00000000;
LATD = 0b00000000;
LATE = 0b00000000;
SYSTEM_Initialize(SYSTEM_STATE_USB_START);
USBDeviceInit();
USBDeviceAttach();
UART_Init(115200);
RCIF = 0; //reset RX pin flag
RCIP = 1; //high priority
RCIE = 1; //Enable RX interrupt
PEIE = 1; //Enable pheripheral interrupt (serial port is a pheripheral)
INTCONbits.GIE = 1;
int i;
LED=0;
while(SW1==1)
{
UARTreadTEXT_1();
USB_TASK();
}
UART_Write_Text("AT+CWMODE=1\r\n");
MyWait(100);
UARTreadTEXT_1();
UART_Write_Text("AT+CWJAP=\"SSID\",\"password\"\r\n");
MyWait(800);
UARTreadTEXT_1();
//UART_Write_Text("AT+CIFSR\r\n");
UART_Write_Text("AT+CIPSTART=\"TCP\",\"パソコンIPアドレス\",ポート\r\n");
MyWait(200);
UARTreadTEXT_1();
UART_Write_Text("AT+CIPMODE=1\r\n");
MyWait(200);
UARTreadTEXT_1();
UART_Write_Text("AT+CIPSEND\r\n");
MyWait(200);
UARTreadTEXT_1();
UART_Write_Text(">OK\r\n");
gN=0;
__delay_ms(15);
while(1)
{
LED=1;
UARTreadTEXT_2();
USB_TASK();
}//end while
}//end main
USBによる通信内容確認モードの評価手順(1)AE-USBPIC44基板への電源供給は個別の5V電源を使用します。(ESP-WROOM-02の3.3Vを使用するとノイズの影響を受けやすくなります。)
(2)「Csharp Simple CDC Demo.exe」をダブルクリックで起動します。
(3)COM7に接続します。
(4)ESP-WROOM-02に電源を供給します。
(5)以下が表示されます。
ready
WIFI CONNECTED
WIFI GOT IP
(6)MyTcpListener.exeをダブルクリックで起動します。
(7)接続ボタンを押します。
(8)AE-USBPIC44基板のSW1ボタンを押して、LEDランプが点灯するのを待ちます。
(9)以下が表示されます。
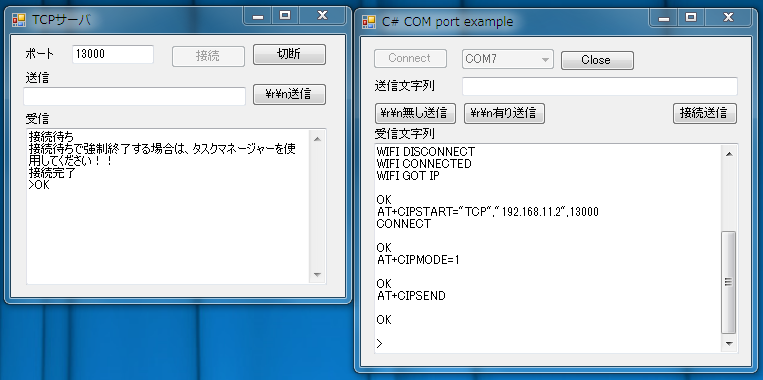
*以上でトランスペアレントモードの初期設定が完了してATコマンドは使用できなくなります。
*再度ATコマンドを有効にするには「+++」を送信するか、ESP-WROOM-02モジュールのリセットまたは電源のOFF/ONが必要となります。
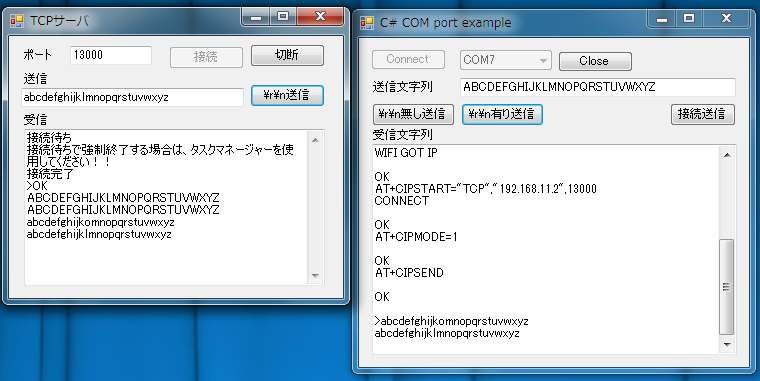
(10)COM7側の送信文字列に「ABCDEFGHIJKLMNOPQRSTUVWXYZ」を入力し、「\r\n有り送信」ボタンを2回押します。
(11)以下のようになります。
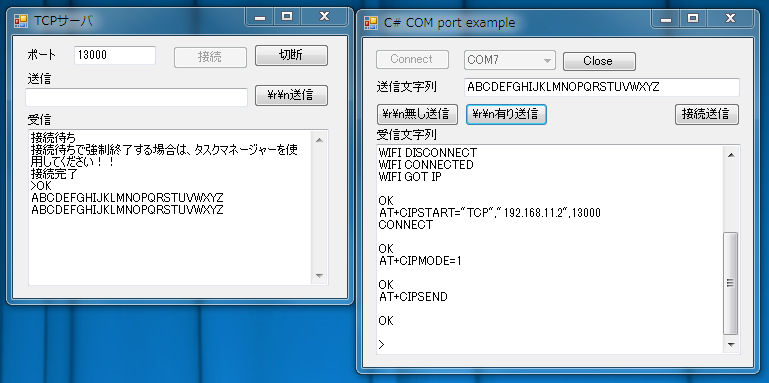
(12TCPサーバ側の送信文字列に「abcdefghijklmnopqrstuvwxyz」を入力し、「\r\n有り送信」ボタンを2回押します。
(13)以下のようになります。
 USBによる通信内容確認無しの評価手順
USBによる通信内容確認無しの評価手順(1)AE-USBPIC44基板への電源供給は個別の5V電源を使用します。(ESP-WROOM-02の3.3Vを使用するとノイズの影響を受けやすくなります。)
(2)ESP-WROOM-02に電源を供給します。
(3)MyTcpListener.exeをダブルクリックで起動します。
(4)接続ボタンを押します。
(5)AE-USBPIC44基板のSW1ボタンを押して、LEDランプが点灯するのを待ちます。
(6)TCPサーバの送信文字列に「abcdefghijklmnopqrstuvwxyz」を入力し、「\r\n有り送信」ボタンを2回押します。
(7)以下のようになります。
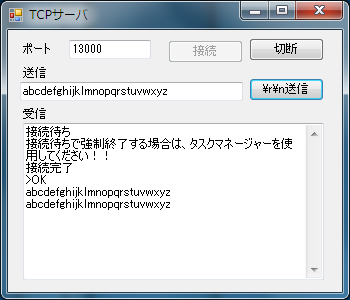
*USB接続無しでAE-USBPIC44基板からの送信を確認できました。
*USB接続無しが本来の使用方法です。
*ソースプログラムの大部分はUSB接続のためのものであり、USB接続無しの場合、ソースプログラムは大幅に簡略化できます。
*ただし、USB接続無しだとデバッグがやりにくい問題があります。
*デバッグ完了後に、USB接続無しのソースプログラムを作成するのが良いとおもいます。
USB接続無しのソースプログラム(1)AE-USBPIC44基板用のUSB接続無しのソースプログラムは以下からダウンロードできます。
[3-2.zip]をダウンロードする。解凍するとUART-Slave.Xフォルダーがあります。
(2)ソースファイルはnewmain.cのみの単純構造となります。
(3)「SSID」「パスワード」「パソコンIPアドレス」「ポート」の設定が必要です。
TCPサーバ使用でAE-USBPIC44基板 からトランスペアレントモード起動まとめ(1)仮想COMポートソフトウエア(HW Virtual Serial Port)とTCPサーバ(MyTcpListener.exe) を比較すると、TCPサーバの方が設定項目が少なく扱いやすい。
(2)仮想COMポートソフトウエア(HW Virtual Serial Port)は接続完了後第1回目の送受信がうまく作動しないためダミー送信が必要となる。
(3)TCPサーバ(MyTcpListener.exe)は接続完了後第1回目の送受信から正常に作動する。
(4)仮想COMポートソフトウエア(HW Virtual Serial Port)より、TCPサーバ(MyTcpListener.exe)方が使いやすい。
 9章:TCPサーバ使用でArduino uno からトランスペアレントモード起動に行く。
9章:TCPサーバ使用でArduino uno からトランスペアレントモード起動に行く。