 擬朿挘岆嵎惂屼僔僗僥儉
擬朿挘岆嵎惂屼僔僗僥儉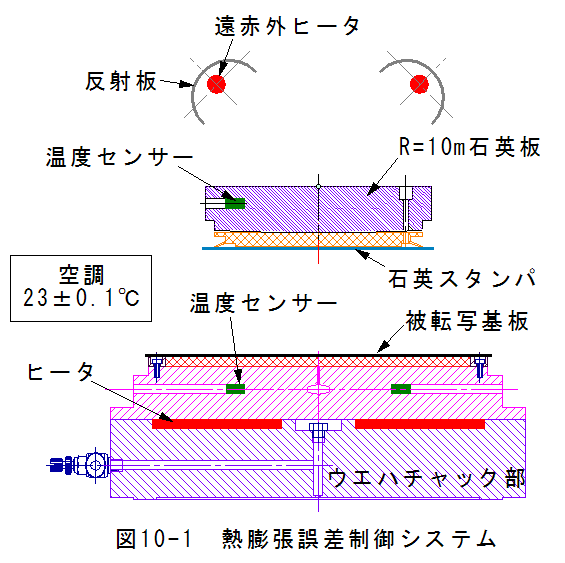 丂僋儕乕儞儖乕儉偺壏搙偼偄偮傕23亷偱堦掕偵曐偨傟偰偄傑偡丅業岝憰抲偺
抲偐傟傞娐嫬偼23亇0.1亷埲壓偺斖埻偱惛枾偵惂屼偝傟偰偄傑偡丅
丂僋儕乕儞儖乕儉偺壏搙偼偄偮傕23亷偱堦掕偵曐偨傟偰偄傑偡丅業岝憰抲偺
抲偐傟傞娐嫬偼23亇0.1亷埲壓偺斖埻偱惛枾偵惂屼偝傟偰偄傑偡丅丂偠偐偟丄憰抲撪偵偼偝傑偞傑側擬尮偑偁傝丄擬尮偼帪娫偱曄摦偡傞偨傔丄愇塸僗僞儞僷 傗旐揮幨婎斅偺壏搙偑曄摦偡傞偙偲偑偁傝傑偡丅
丂壏搙曄摦偺嵟戝尨場偼丄業岝偺偨傔偺巼奜慄徠幩偵傛傞壏搙曄摦偱偡偑丄僗僥乕僕嬱摦偺 偨傔偺儕僯傾儌乕僞摍傕壏搙曄摦偺尨場偲側傝傑偡丅
丂愇塸僗僞儞僷傕旐揮幨婎斅傕擬朿挘偡傞偨傔丄擬朿挘婲場偺僗働乕儖岆嵎偑敪惗偟傑偡丅
丂崅埵抲惛搙傪払惉偡傞偨傔偵偼丄擬朿挘岆嵎傪尩枾偵惂屼偡傞偙偲偑晄壜寚偱偡丅
丂擬朿挘岆嵎惂屼僔僗僥儉椺傪恾10-1偵帵偟傑偡丅
丂恾10-1偵偍偄偰丄娐嫬壏搙偼23亇0.1亷偵惂屼偝傟偰偄傞偲偟傑偡丅
丂巼奜慄徠幩傗儕僯傾儌乕僞偵傛傞敪擬偼丄愇塸僗僞儞僷傗旐揮幨婎斅偺壏搙傪忋徃偡傞 曽岦偵摥偒傑偡丅
丂偙偙偱丄娐嫬壏搙偑23亷偵愝掕偝傟偰偄傞偺偼丄恖娫偺嶌嬈娐嫬傪峫椂偟偰偺愝掕偱偁傝丄 昁偢偟傕愇塸僗僞儞僷傗旐揮幨婎斅偺愝掕壏搙傪23亷偵偡傞昁梫偼偁傝傑偣傫丅
丂偙偙偱偼丄壖偵愇塸僗僞儞僷傗旐揮幨婎斅愝掕壏搙傪娐嫬壏搙傛傝5亷崅偄28亷偵 愝掕偡傞偲偟傑偡丅
丂偙偙偱拲堄偟側偗傟偽側傜側偄偺偼丄挿悺朄偺婎弨壏搙偑23亷偲側偭偰偄傞揰偱偡丅 婎弨壏搙傪28亷偲偡傞傢偗偱偡偺偱丄塣梡忋偺曗惓偑昁梫偲側傝傑偡丅乮偁傜偐偠傔丄 愇塸僗僞儞僷偺挿悺朄傪曗惓偟偰嶌惉偡傞昁梫偑偁傝傑偡丅乯
丂恾10-1偵偍偄偰丄愇塸僗僞儞僷偼墦愒奜僸乕僞傪梡偄偰壛擬偟28亷偵側傞傛偆偵惂屼 偟傑偡丅墦愒奜僸乕僞偵棳偡揹棳偑彮側偗傟偽丄愇塸僗僞儞僷偺壏搙偼23亷偺曽岦偵 曄壔偡傞偱偟傚偆丅墦愒奜僸乕僞偵棳偡揹棳傪戝偒偔偡傞偲愇塸僗僞儞僷偺壏搙偼28亷 傪墇偊傞曽岦偵壏搙偑曄壔偡傞偼偢偱偡丅
丂偙偙偱丄R=10m愇塸斅偵偼壏搙僙儞僒乕偑巇崬傑傟偰偍傝丄壏搙僙儞僒乕晹偺壏搙偑28亷 偵側傞傛偆偵尩枾側惂屼偑壜擻偱偡丅
丂摨條偵旐揮幨婎斅偼僸乕僞傪梡偄偰壛擬偟28亷偵側傞傛偆偵惂屼 偟傑偡丅僸乕僞偵棳偡揹棳偑彮側偗傟偽丄旐揮幨婎斅偺壏搙偼23亷偺曽岦偵 曄壔偡傞偱偟傚偆丅僸乕僞偵棳偡揹棳傪戝偒偔偡傞偲旐揮幨婎斅偺壏搙偼28亷 傪墇偊傞曽岦偵壏搙偑曄壔偡傞偼偢偱偡丅
丂偙偙偱丄僂僄僴僠儍僢僋偵偼壏搙僙儞僒乕偑巇崬傑傟偰偍傝丄壏搙僙儞僒乕晹偺壏搙偑28亷 偵側傞傛偆偵尩枾側惂屼偑壜擻偱偡丅
丂偙偙偱媈栤偑惗偠傞偺偼丄壏搙僙儞僒乕晹偺壏搙偑愇塸僗僞儞僷傗旐揮幨婎斅偺壏搙偲 摍偟偄偺偐丠愇塸僗僞儞僷傗旐揮幨婎斅偵捈愙壏搙僙儞僒乕傪晅偗傜傟側偄偺偐丠
丂幚憰忋偺搒崌偱愇塸僗僞儞僷傗旐揮幨婎斅偵捈愙壏搙僙儞僒乕傪晅偗傜傟側偄偺偱偡丅
丂愇塸僗僞儞僷傗旐揮幨婎斅偺嬤朤偵愝抲偡傞偒傝偁傝傑偣傫丅 廬偭偰丄庒姳偺壏搙岆嵎偑惗偠傞偼偢偱偡丅偟偐偟丄娐嫬壏搙丄R=10m愇塸斅壏搙丄僂僄僴僠儍僢僋壏搙偲 愇塸僗僞儞僷壏搙丄旐揮幨婎斅壏搙偺娭學幃傪幚尡揑偵尒弌偣傟偽丄娐嫬壏搙丄R=10m愇塸斅壏搙丄僂僄僴僠儍僢僋壏搙 偱惂屼偡傞偙偲偼壜擻側偼偢偱偡丅
僗働乕儖岆嵎曗惓僔僗僥儉丂幚梡婡偱偼丄挻崅惛搙偺儗乕僓應挿僼傿乕僪僶僢僋偺XY兤僗僥乕僕傪幚憰偟傑偡丅 傑偨丄崅惛搙僷僞乕儞擣幆偵傛傞傾儔僀儊儞僩婡擻傪幚憰偟傑偡丅
丂忋婰偺婡擻偵傛傝丄旐揮幨婎斅忋偺僷僞乕儞偺挿悺朄傪尩枾偵應掕偡傞偙偲偑壜擻偱偡丅
丂愇塸僗僞儞僷偺僷僞乕儞傪旐揮幨婎斅忋偵揮幨偡傟偽丄揮幨僷僞乕儞偺挿悺朄傪尩枾偵應掕偡傞偙偲偑壜擻偱偡丅
丂傕偟丄忋婰偺挿悺朄偵晄堦抳偑妋擣偝傟偨応崌丄恾10-1偵帵偡惂屼僔僗僥儉偱偼丄愇塸僗僞儞僷偲旐揮幨婎斅偺 壏搙傪偦傟偧傟撈棫偵惂屼偱偒傞偨傔丄挿悺朄偺晄堦抳傪曗惓偡傞偙偲偑壜擻偱偡丅
丂僗働乕儖岆嵎曗惓僔僗僥儉偼丄挻崅惛搙偺儗乕僓應挿僼傿乕僪僶僢僋偺XY兤僗僥乕僕偲崅惛搙僷僞乕儞擣幆偵傛傞傾儔僀儊儞僩婡擻 傪昁梫偲偡傞偨傔丄幚梡婡偺帋嶌抜奒偱妋擣偱偒傞偙偲偵側傝傑偡丅
傑偲傔丒僫僲僀儞僾儕儞僩媄弍偼師悽戙儕僜僌儔僼傿乕媄弍偲偟偰丄嵟傕桳朷偱偡丅
丒幚梡壔偺偨傔偵偼丄柍寚娮僗僥僢僾&儕僺乕僩揮幨偺幚徹偑晄壜寚偱偡丅
丒偝傜偵偼丄揮幨僷僞乕儞偺僗働乕儖岆嵎乮擬朿挘岆嵎乯偺尩枾側惂屼偺幚徹偑昁梫偱偡丅
 岺妛娭學偺嶨妛俈復丗壛埑偵傛傞儗僕僗僩棳摦偵峴偔丅
岺妛娭學偺嶨妛俈復丗壛埑偵傛傞儗僕僗僩棳摦偵峴偔丅