 1次元曲げモーメントの場合の平板の曲げ
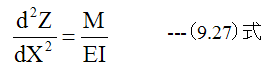
1次元曲げモーメントの場合の平板の曲げ1次元曲げモーメントの梁の曲げにおいては、通常応力も1次元で扱うことが一般的で多くの場合、 下記の基礎方程式が用いられます。
上記の式は、応力が1次元方向のみに作用することを前提としており、扱いやすいため多く場合で使用されます。しかし 、厳密に考えると応力は2次元方向に発生します。 2次元応力を考慮した平板の曲げについて検討して みたいと思います。
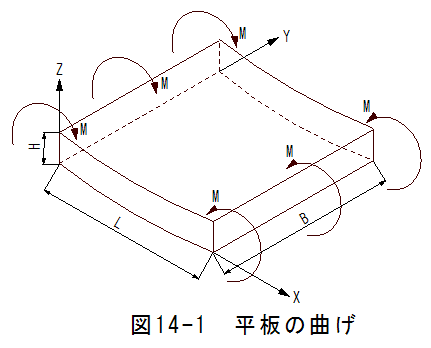
図14-1は1次元曲げモーメントのみが作用する平板の状態を示しています。ここでY軸のまわ りの単位長さ当たりのモーメントMyは
中立軸の曲率半径をRとした場合、X軸方向の歪εxは
次にY方向の歪εyとZ方向の応力σzは、下記の条件式が成立するとします。
ここで下記の関係式を使用します。
(12.11)式、 (12.12)式に(14.2)式、(14.3)式を代入します。
(14.6)式は上記の条件において、Y方向の応力が発生することを示しています。
応力によるモーメントの総和(M)は

σ=σxとして、 (9.14)式に(14.5)式を代入すると

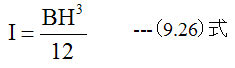
ここで

の定義式(9.16)式を(14.7)式に代入して整理すると

となります。また
(9.24)式を(14.7)式を代入すると

2次元応力を考慮した平板の曲げの基礎方程式を得ることがで きます。また単位長さあたりの曲げモーメントの式(14.1)式を代入すると
となります。また下記の定義式

を使用すると(14.10)式は
となります。Dを板の曲げ剛性といいます。 (9.27)式と(14.9)式を比較すれば明らかなように、 2次元応力を考慮した場合の撓み量は(1-ν2)倍と小さくなります。
 互いに直交する2方向への曲げ
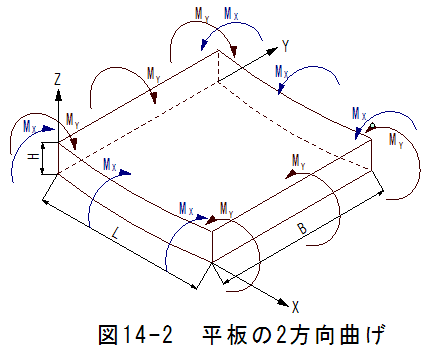
互いに直交する2方向への曲げ図14-2に互いに直交する2方向への曲げの状態を示します。
図14-2において、MxはX軸のまわりの単位長さあたりのモーメ ントであり、MyはY軸のまわりの単位長さあたりのモーメントです。
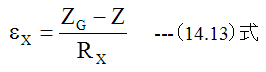
中立軸のX方向曲率半径をRxとした場合、X軸方向の歪εxは
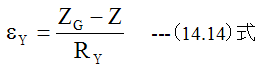
中立軸のY方向曲率半径をRyとした場合、Y軸方向の歪εyは
ここで下記の関係式を使用します。
(12.11)式、 (12.12)式に(14.13)式、(14.14)式を代入します。
応力によるモーメントの総和(M)は
ですので、X方向モーメントMxとY方向モーメントMyは
ここで

(14.17)式、 (14.18)式に(14.19)式を代入すると
ここで
(14.20)式、 (14.21)式に(14.11)式を代入すると
次に下記の曲率半径関係式を使用します。
(14.22)式、 (14.23)式に(14.24)式と(14.25)式を代入すると
(14.26)式と(14.27)式が互いに直交する2方向への曲げの基礎方程式です。
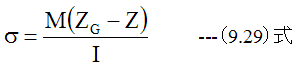
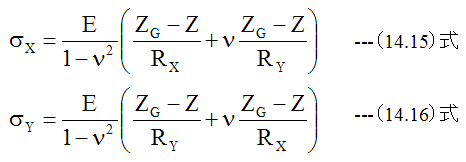
(14.22)式と(14.23)式を(14.15)式、 (14.16)式に代入すると
となります。 (14.28)式、 (14.29)式は応力を与える式であり、Zgは重心位置です。
2次元応力を考慮した平板の曲げのまとめ互いに直交する2方向への曲げにおいて、基礎方程式は一対の偏微 分方程式となることがわかりました。具体的なモデルの解を求めるには、 一対の偏微分方程式を解く必要があり容易ではなさそうです。
 15章:円板の軸対称曲げに行く。
15章:円板の軸対称曲げに行く。