DCモータ制御を検討します。
 DCモータ特性
DCモータ特性一例として型式FA-130RA-18100(マブチモーター)の特性について記載します。
(1)最大効率条件
最大効率条件は電圧3Vにおいて以下の表となります。
| 項目 | 単位 | 値 |
| SPEED | r/min | 9710 |
| CURRENT | A | 0.56 |
| TORQUE | mN・m | 0.74 |
| OUTPUT | W | 0.76 |
(2)無負荷回転特性
無負荷回転特性は図13-1に示すようになります。
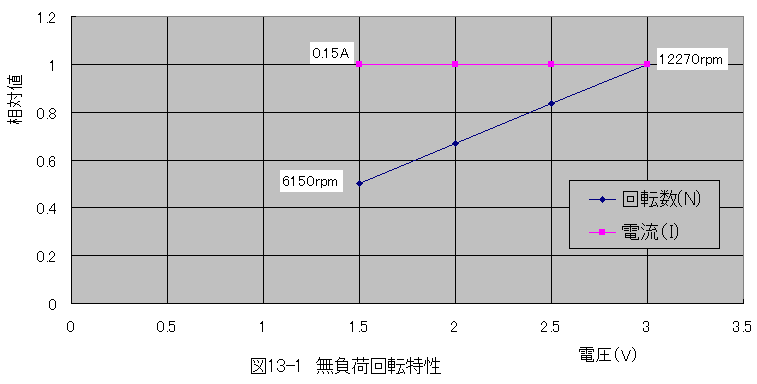
図13-1から無負荷時の回転数は電圧に比例し、電流は一定であることがわかります。
(3)電圧3V一定回転特性
電圧3V一定回転特性を図13-2に示します。
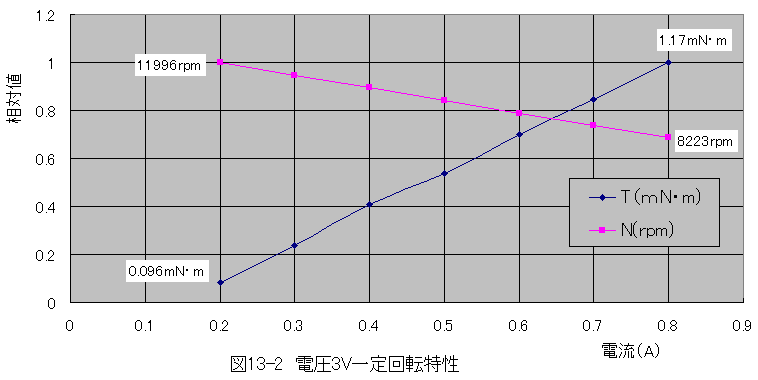
図13-2から電流が0.15A以上になると電流に比例してトルクが増大することがわかります。また、回転数は電流の増大に伴い減少することがわかります。
以上の特性から、回転数を上げるには電圧を上げ、トルクを上げるには電流を増大する必要があることがわかります。
回転数を制御する場合は電圧制御、トルクを制御する場合は電流制御が有効であることが理解できます。
DCモータ制御回路(1)(1)評価回路図
DCモータ制御回路(1)を図13-3に示します。
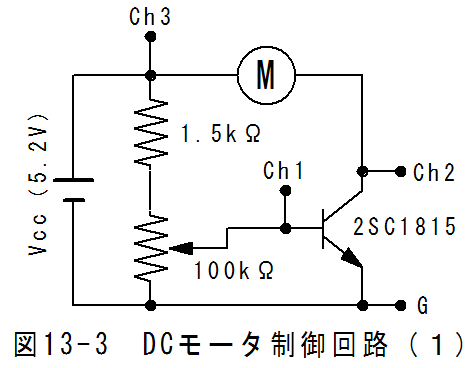
図13-3の回路でテストしてみるとDCモータは、自動的に回転することはなく、手で回転を与えて初めて回転しまし た。一度回転すると回転を維持します。
(2)簡易オシロによる電圧変化測定結果
簡易オシロによる電圧変化測定結果を図13-4に示します。
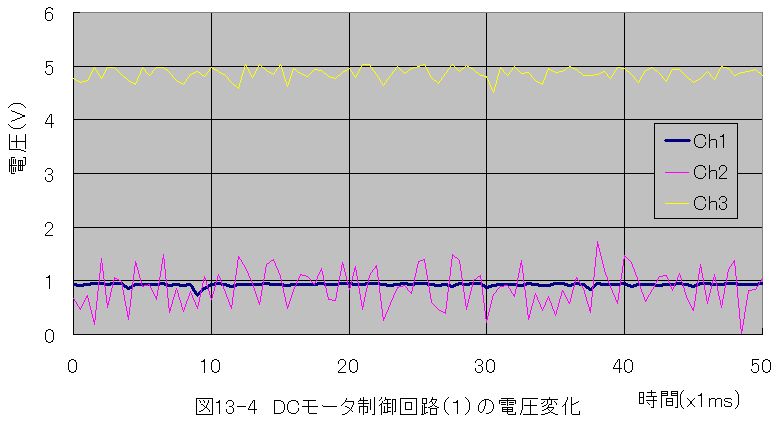
図13-4のグラフから
・DCモータ両端の電圧はVch3-Vch2であり、約4Vですが少し脈動しています。
・電源電圧は5.2Vですが、動作状態で約4.9程度に低下して脈動しています。
・DCモータに流れる電流はこの測定条件からは計算できない。
DCモータ制御回路(2)(1)評価回路図
DCモータに流れる電流の測定するため、図13-5に示すように47Ωの抵抗を追加しました。
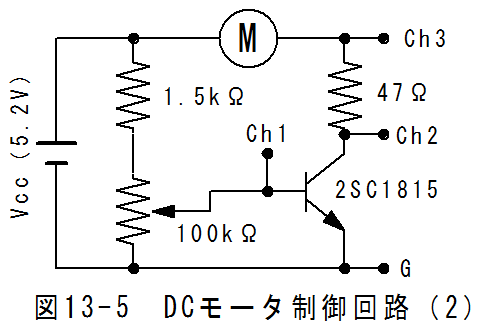
(2)DCモータに流れる電流の測定結果
図13-5の回路の測定結果を図13-6に示します。
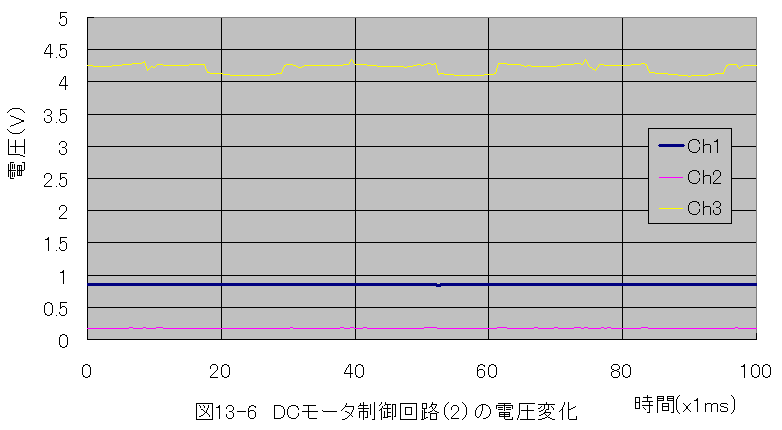
図13-6においてDCモータに流れる電流はI=(Vch3-Vch2)/47=0.087Aであることが確認できました。この結果はDCモータの無負荷回転電流 よりの小さく、電流が不足して正常な回転をしないことが明らかとなりました。
単3乾電池4個での駆動(1)評価回路図
電源を単3乾電池4個に変更し、図13-7に示す回路で駆動しました。
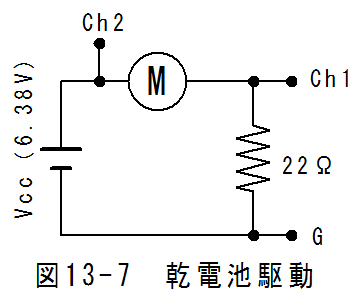
この回路の電圧と電流変化をCh1、Ch2、Ch3,点について同時測定結果します。
(2)単3乾電池4個での駆動の測定結果
図13-7の回路の測定結果を図13-8に示します。
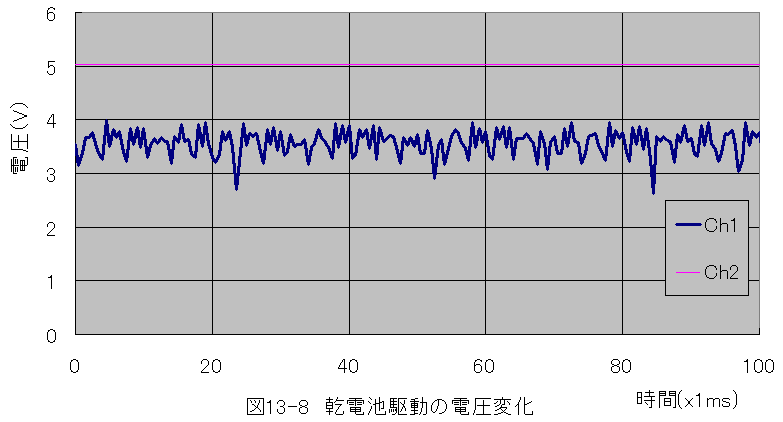
図13-8のグラフにおいて、Vch1は抵抗22Ω両端の電圧です。したがって電流はI=Vch1/22=0.162Aとなります。この値は無負荷回転電流0.15Aを僅かですが上回り自動的に回転し始めました。
Vch2は電源電圧ですが、簡易オシロの測定可能電圧5V以上のため、最大値で一定となります。
以上の検討から、動作不良の主原因は評価に使用した5V電源の容量不足であることは明らかです。電源を単3乾電池4個に変更すれば、動作は安定すると思われます。
しかし、使用したトランジスタ2SC18515の最大許容コレクタ電流は0.15Aです。この値はDCモータの無負荷回転電流0.15Aが限界ということになります。実用的にはマージン不足ということになります。
Cモータの正逆が切替られる回路(1)評価回路図
DCモータの正逆が切替られる回路を図13-9に示します。
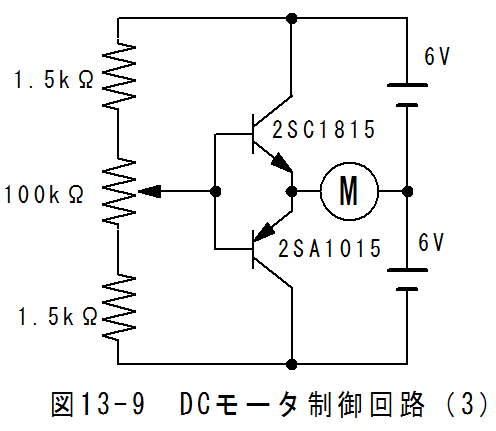
図13-9の回路はNPNトランジスタとPNPトランジスタを使ったコンプリメンタリ(補間)方式のプッシュプル回路です。
この回路はアナログ的に正転・逆転を制御可能でDCサーボ制御が可能です。
ただし、電源が2個必要となり、実用的には電源の容量とトランジスタの容量を大きくする必要があると思われます。
一般的なDCモータ制御一般的なDCモータ制御は正転、逆転、停止、ブレーキをデジタル的に切替ます。このような使用目的にはDC モータ用フルブリッジドライバTA7291P,TA7291S/SG,TA7291F/FG(東芝)が適します。
結果の検討(1)DCモータは機械的動作を実行するための基本部品です。
(2)DCモータを駆動すると大きな電流が流れるため、電源の容量が大きい必要がある。
(3)DCモータを停止状態から駆動すると駆動トルクが大きいため、大きな電流が流れる。
(4)DCは定常回転数に達しても負荷トルクが変動すると、電流が変動し回転数も変動する。
(5)一般的なDCモータ制御においては、電流変動や回転数変動をある程度許容する必要がある。
(6)回転数や位置を正確に制御するには、サーボ制御が必要となる。
 14章:マルチバイブレータ回路に行く。
14章:マルチバイブレータ回路に行く。