HC-SR04 超音波距離センサーモジュール(アマゾン)¥ 475をテストします!!
 HC-SR04 超音波距離センサーモジュール評価回路図
HC-SR04 超音波距離センサーモジュール評価回路図HC-SR04 超音波距離センサーモジュール評価回路図を以下に示します。
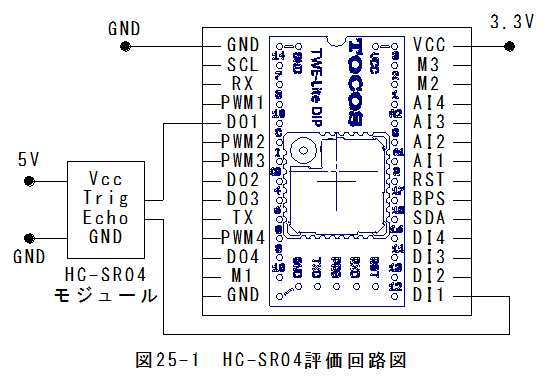
HC-SR04 超音波距離センサーモジュール評価用ですので、無線機能は使用せずに、トワイ・ライターとTWE-Liteのみを使用します。
ベースプロジェクトは「Samp_PingPong」を使用します。
HC-SR04 超音波距離センサーモジュールの詳細仕様は下記を参照します。
 [25-1.pdf]をダウンロードする。[25-2.pdf]をダウンロードする。
[25-1.pdf]をダウンロードする。[25-2.pdf]をダウンロードする。| 品名 | 単価 | 個数 | 小計 | 購入先 |
| HC-SR04 超音波距離センサーモジュール | 475 | 1 | 475 | アマゾン |
| ZigBeeワイヤレスモジュール TWE-Lite Dip-WA (半完成品セミキット) | 1620 | 1 | 1620 | 秋月電子通商 |
| USBアダプター TWE-Lite R(トワイ・ライター) | 1890 | 1 | 1890 | 秋月電子通商 |
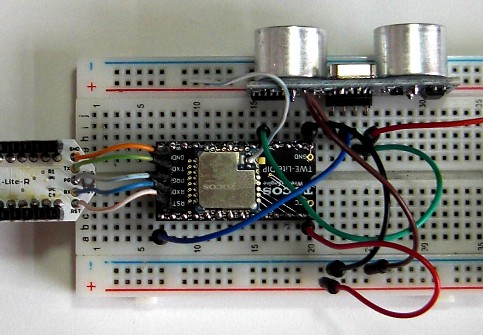
HC-SR04 超音波距離センサーモジュール評価回路外観HC-SR04 超音波距離センサーモジュール評価回路外観を以下に示します。
 HC-SR04 超音波距離センサーモジュール評価プログラムのダウンロード
HC-SR04 超音波距離センサーモジュール評価プログラムのダウンロード完成プログラムは「40-25.zip」ファイルをダウンロードしてください。
[40-25.zip]をダウンロードする。解凍するとフォルダー内に
Samp_PingPongg
フォルダーがあります。
\40-25\Samp_PingPong\PingPong\Build\Samp_PingPong_PingPong_JN5164_0_1_4.binが実行ファイルです。
WindowsパソコンソフトはターミナルソフトTera Termや9章~24章のWin-PingPong.exeが適用できます。
24章のWin-PingPong.exeがフォルダー内にあります。
基本操作方法(1)\40-25\Samp_PingPong\PingPong\Build\Samp_PingPong_PingPong_JN5164_0_1_4.binを無線マイコンTWE-Lite DIP(トワイライト・ディップ)に書込みます。(方法は7章:ToCoNet(トコネット)のソフトウエア開発環境(SDK) とPingPongの実行プログラムの書込みを参照願います。
(2)TWE-Lite R(トワイ・ライター)は接続したままにします。
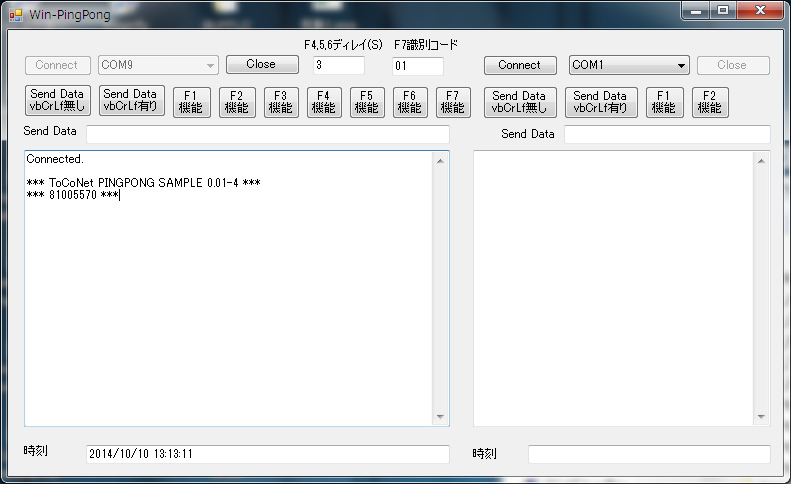
(3)「Win-PingPong.exe」をダブルクリックで起動します。
(4)画面の左側を「COM9」にセットして、「Conect」ボタンを押します。
(5)HC-SR04 超音波距離センサーモジュール評価回路の電源をいれます。(リセットボタンは電源ON/OFFと同じとなります。下記画面となります。
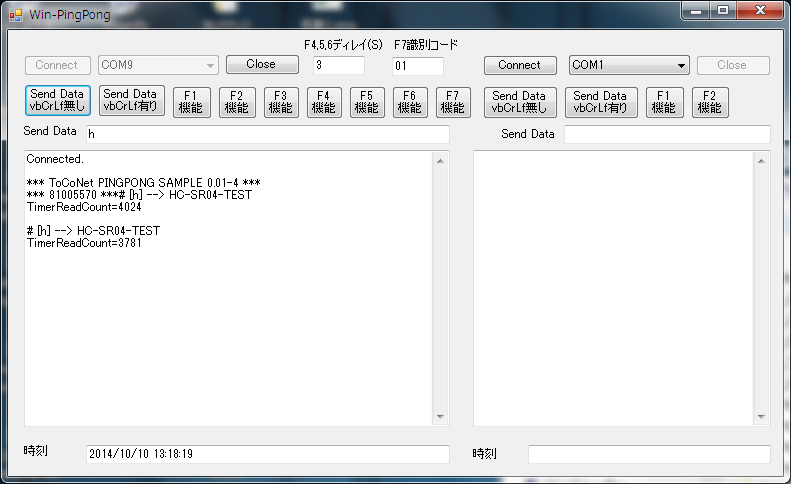
(6)Send Data に「h」を入力して「Send Data vbCrLf無し」ボタンを押すと測定結果が表示されます。
 TimerReadCount値と長さ(mm)の相関
TimerReadCount値と長さ(mm)の相関TimerReadCount値と長さ(mm)の相関を測定してグラフにすると以下のようになりました。
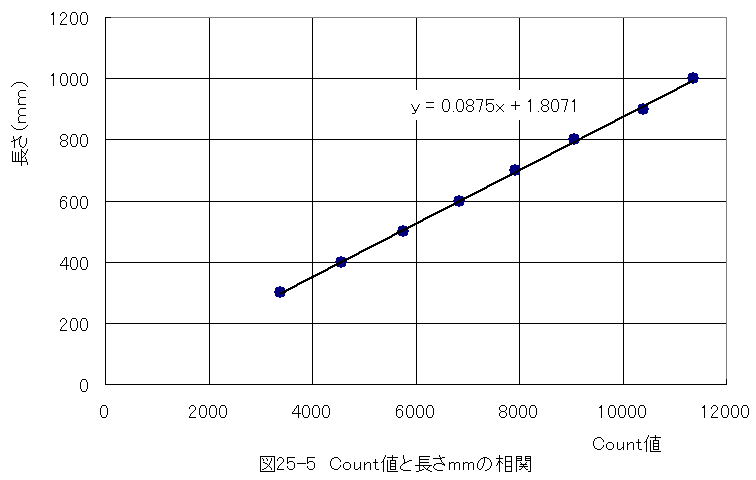
図25からTimerReadCount値に0.0875をかけた値が長さ(mm)になることが確認できます。この係数 はCPUのクロック周波数とプレスケールの値に依存します。
オフセットが1.8mmありますが、これは測定基準位置に依存します。
Samp_PingPongプログラムの変更箇所(1)IOの設定とIO制御関数の追加
以下のコードを追記しました。
//***変更1 #define vPortSetHi(c) vAHI_DioSetOutput(1UL << (c), 0) #define vPortSetLo(c) vAHI_DioSetOutput(0, 1UL << (c)) #define vPortSet_TrueAsLo(c, s) vAHI_DioSetOutput((s) ? 0 : 1UL << (c), s ? 1UL << (c) : 0) #define vPortAsInput(c) vAHI_DioSetDirection(1UL << (c), 0) #define vPortAsOutput(c) vAHI_DioSetDirection(0, 1UL << (c)) #define bPortRead(c) ((u32AHI_DioReadInput() & (1UL<<(c))) ? FALSE : TRUE) // Lo as True #define u32PortReadBitmap() (u32AHI_DioReadInput()) #define bPortCheckBitmap(bitmap, c) ((bitmap & (1UL<<(c))) ? FALSE : TRUE) #define vPortDisablePullup(c) vAHI_DioSetPullup(0x0, 1UL << (c)) // TWE-Lite DIP (TWELITE の標準構成) #define PORT_OUT1 18 #define PORT_OUT2 19 #define PORT_OUT3 4 #define PORT_OUT4 9 #define PORT_INPUT1 12 #define PORT_INPUT2 13 #define PORT_INPUT3 11 #define PORT_INPUT4 16
(2)HC-SR04 超音波距離センサー制御プログラムの追加
タイマーは0~4の5個が使用可能ですが、下記コードではタイマー4を使用しました。
case 'h'://***変更1 vfPrintf(&sSerStream,"HC-SR04-TEST\r\n");//TEST表示 vPortAsInput(PORT_INPUT1);//入力設定 vPortAsOutput(PORT_OUT1);//出力設定 vPortSetLo(PORT_OUT1);//トリガOFF vAHI_TimerEnable(E_AHI_TIMER_4,3,FALSE,FALSE,FALSE);//プレスケール1/8設定 vAHI_TimerStartSingleShot(E_AHI_TIMER_4,0x0000,0x0000);//タイマー4スタート while(u16AHI_TimerReadCount(E_AHI_TIMER_4) < 20);//10μsディレイ vPortSetHi(PORT_OUT1);//トリガON vAHI_TimerStop (E_AHI_TIMER_4);//タイマー4ストップ vAHI_TimerStartRepeat(E_AHI_TIMER_4,0x0000,0x0000);//タイマー4スタート while(u16AHI_TimerReadCount(E_AHI_TIMER_4) != 20);//10μsディレイ vPortSetLo(PORT_OUT1);//トリガOFF vAHI_TimerStop (E_AHI_TIMER_4);//タイマー4ストップ vAHI_TimerStartRepeat(E_AHI_TIMER_4,0x0000,0x0000);//タイマー4スタート while(bPortRead(PORT_INPUT1) && u16AHI_TimerReadCount(E_AHI_TIMER_4) != 0xffff);//エコーON vAHI_TimerStop (E_AHI_TIMER_4);//タイマー4ストップ vAHI_TimerStartRepeat(E_AHI_TIMER_4,0x0000,0x0000);//タイマー4スタート while(!bPortRead(PORT_INPUT1) && u16AHI_TimerReadCount(E_AHI_TIMER_4) != 0xffff);//エコーOFF vfPrintf(&sSerStream,"TimerReadCount=%d\r\n",u16AHI_TimerReadCount(E_AHI_TIMER_4));//結果出力 vAHI_TimerStop (E_AHI_TIMER_4);//タイマー4ストップ break;
結果の検討(1)Samp_PingPongは入出力ピンの設定がされていないため、入出力ピンの設定が必要となりました。
(2)タイマーは0~4の5個が使用可能ですが、タイマー0のみが種々の機能があり、1~4は単純タイマー機能となっています。
(3)今回はタイマー4を使用しました。
(4)今回はHC-SR04 超音波距離センサーモジュール評価用であり、無線通信は省略しました。
(5)比較的シンプルなコードでHC-SR04 超音波距離センサーモジュールを制御できることがわかりました。
 26章:高精度IC温度センサLM61BIZに行く。
26章:高精度IC温度センサLM61BIZに行く。