コパルステッピングモーター SPG27-1702の応用として糸巻き式自動深さ測定機を製作してみました。
 糸巻き式自動深さ測定機の制御回路図
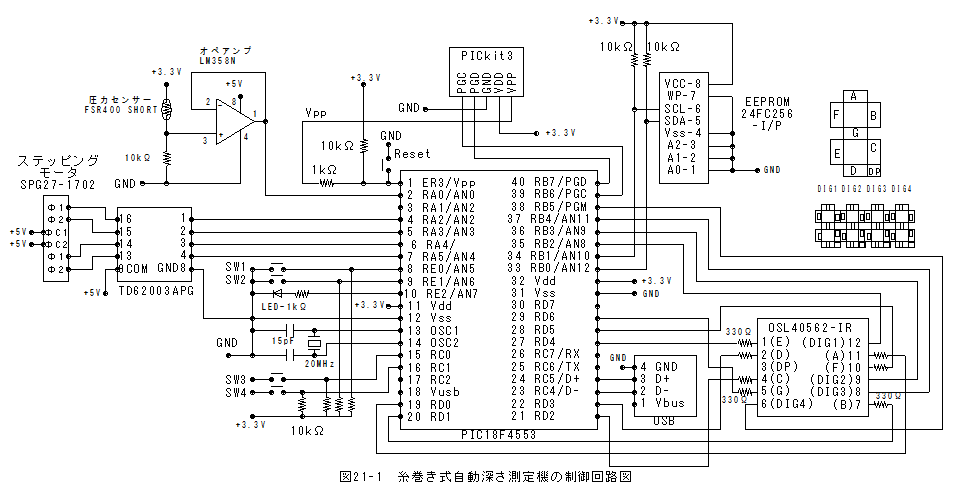
糸巻き式自動深さ測定機の制御回路図糸巻き式自動深さ測定機の制御回路図を以下に示します。
上記回路図において
(1)コパルステッピングモーター SPG27-1702をトランジスタアレイ(7chダーリントンシンクドライバ)TD62003APGで駆動します。
(2)圧力センサーFSR400 SHORT(秋月電子通商)の抵抗値変化は電源電圧3.3Vを10kΩの抵抗で分圧し、オペアンプLM358Nで電圧フォロアします。
(3)長さ(mm)または荷重の値をダイナミック接続4桁高輝度赤色7セグメントLED表示器 カソードコモン カソード共通接続で表示します。
(4)動作モード、動作条件、測定結果はシリアルIスケアC EEPROM 24FC256-I/Pに記録します。
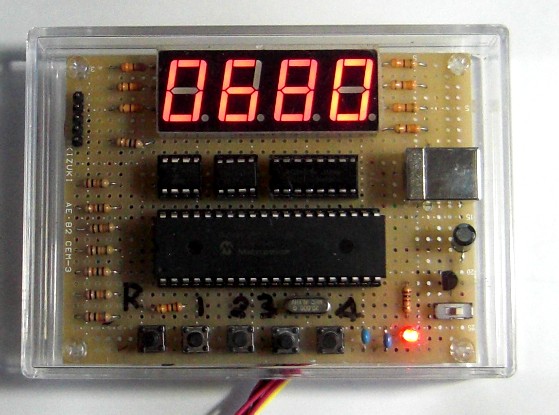
糸巻き式自動深さ測定機の制御回路外観糸巻き式自動深さ測定機の制御回路を以下に示します。
 糸巻き式自動深さ測定機のプログラム
糸巻き式自動深さ測定機のプログラム16章:高温用温度レコーダの製作、「41-16.zip」をベースに修正しました。
まずは下記の「41-21.zip」ファイルをダウンロードしてください。
 [41-21.zip]をダウンロードする。
[41-21.zip]をダウンロードする。解凍するとフォルダー内にUMy-CDC-Basicフォルダーとdynamic_cdc_demo.exeがあります。USB-HID-SCDフォルダー内に
(1)UMy-CDC-Basicフォルダー
*My-CDC-Basic.Xがソースプログラムです。
*「XC8」用です。
(2)dynamic_cdc_demo.exe
*標準のWindows用実行ファイルです。
*Win-PingPong.exeでも同様な操作ができます。
(3)注意事項
*上記プログラムはPIC18F4553用です。
操作方法(1)PIC18F4553にプログラムを書込みます。
(2)USBを接続し、dynamic_cdc_demo.exeを起動します。
(3)Send DataにAA#を設定して、Send Dataボタンを押します。
(4)最後に実施した動作条件と測定結果が表示されます。(最初は、正しい表示がありません。)
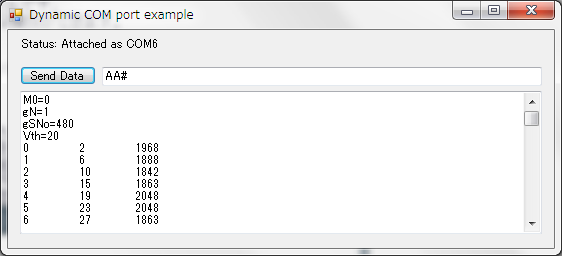
*M0=0のとき7セグLEDには高さ(mm)が表示、M0=1のとき荷重(div)が表示されます。
*gN=1のとき、測定間隔は0.1sとなります。設定可能最大値は65535です。
*gSNo=480は測定データ数です。
*Vth=20は重量変化検出閾値です。20x10=200divで閾値判定します。設定可能最大値は255です。
*測定データはNo、高さ(mm)、荷重(div)の順で表示されます。
(5)M0とgNの変更:例えばM0=1、gN=10に変更する場合
Send DataにBB#1#10#を設定して、Send Dataボタンを押します。
(6)Vthの変更:例えばVth=30に変更する場合
Send DataにCC#30#を設定して、Send Dataボタンを押します。
(7)SWRボタンを押すとリセットされますが、M0、gN等記録データはリセットされません。電源をON/OFFしても同じです。
(8)SW3ボタンを押している間だけ下降します。(手動モード)
(9)SW4ボタンを押している間だけ上昇します。(手動モード)
(10)SW1ボタンを押して離すと自動測定を開始します。(自動モード)
*測定結果は自動記録されます。
(11)SW2ボタンを押して離すと自動測定を終了して、元の高さまで戻ります。(自動モード)
測定事例約600mm程度の高さから、約150mm程度の高さまで水がはいった容器をおいて測定してみました。
また、重りは鉄製金具9gx5枚=45gとしました。
(1)測定結果生データ
測定結果生データは21-1.txtを参照願います。
[21-1.txt]をダウンロードする。(2)測定結果グラフ
測定結果グラフを以下に示します。
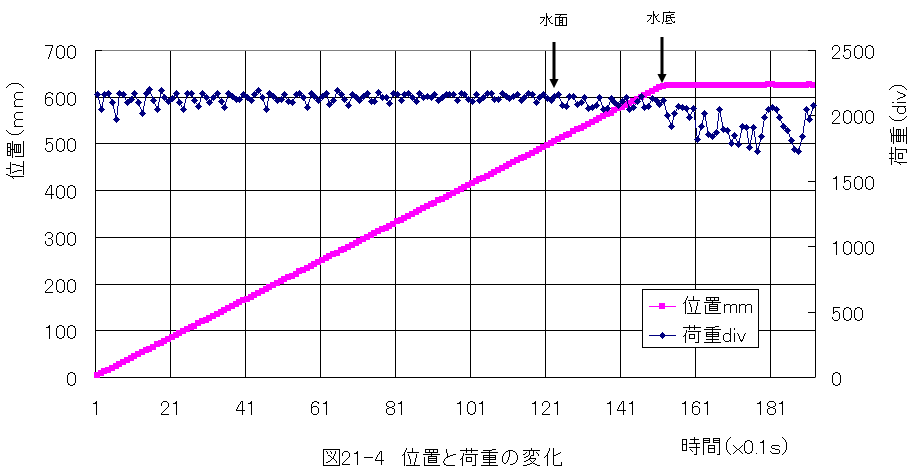
上記グラフから
(1)荷重変動は起動時に大きく、徐々に減衰する。
(2)水面に達すると僅かに荷重が減少する。
(3)水底に達すると荷重は大きく振動しながら、高さは一定に保たれる。
等がわかります。
My-CDC-Basic.Xプログラムコードのポイント*MPLAB_X_IDE_v2.25とPIC18F4553マイコンの復習、16章:高温用温度レコーダの製作をベースに修正しました。
*コパルステッピングモーター SPG27-1702の制御に関しては19章:ステッピングモーターの制御を参照しました。
(1)EPROM書込み方法の変更
*測定データのEPROMへの書込みはタイマー0割込みから呼び出されるvoid Int_Low()関数内で行っています。
*void Int_Low()関数内で1バイト書込み関数void Write_EPROM(unsigned short addr,unsigned char send_data)を多数回実行するとタイミング的な不具合が発生しました。
そこでvoid Int_Low()関数内での書き込みを
gEPdata[0]=(unsigned char)(X1/256);
gEPdata[1]=(unsigned char)(X1);
gEPdata[2]=(unsigned char)(X2/256);
gEPdata[3]=(unsigned char)(X2);
Write_EPROM_N(4*gSNo+8,4);//EPROM書込み
と1回に変更しました。
unsigned char gEPdata[10];//Write_EPROM_N用グローバル配列変数
//N個のgEPdata[i]を同時にEPROMに書込み
void Write_EPROM_N(unsigned short addr,unsigned char N)
{
int i;
TRISB = 0b00000011; //B1=SCL(INPUT),BO=SDA(OUTPUT)I2C通信
SSPCON1 = 0x28; // SSP enable & I2C Master mode, clock = FOSC / (4 * (SSPADD+1))
SSPADD = 0x0F; // 0x00だと動作しないクロック設定
unsigned char addr1, addr2;
addr2=addr;
addr1=addr >> 8;
//1バイト書込み
PIR1bits.SSPIF = 0;//I2C_通信割込みフラグクリア
SSPCON2bits.SEN = 1;//I2C_startビット
while (SSPCON2bits.SEN) {}//終了待ち
PIR1bits.SSPIF = 0;//I2C_通信割込みフラグクリア
while(SSPSTATbits.BF){};
SSPBUF =0xA0;//0xA0 //書込み制御コード
if (SSPCON2bits.ACKSTAT) {PORTD=0b11111110;}//ACKチェック
while (!PIR1bits.SSPIF) {}//終了待ち
PIR1bits.SSPIF = 0;//I2C_通信割込みフラグクリア
while(SSPSTATbits.BF){};//SSPBUFの干渉確認
SSPBUF = addr1; // 書き込みアドレス1
if (SSPCON2bits.ACKSTAT) {PORTD=0b11111101;}//ACKチェック
while (!PIR1bits.SSPIF) {}//終了待ち
PIR1bits.SSPIF = 0;//I2C_通信割込みフラグクリア
while(SSPSTATbits.BF){};//SSPBUFの干渉確認
SSPBUF = addr2;// 書き込みアドレス2
if (SSPCON2bits.ACKSTAT) {PORTD=0b11111100;}//ACKチェック
while (!PIR1bits.SSPIF) {}//終了待ち
for(i=0;i < N;i++)
{
PIR1bits.SSPIF = 0;//I2C_通信割込みフラグクリア
while(SSPSTATbits.BF){};//SSPBUFの干渉確認
SSPBUF =gEPdata[i];// send_data書き込み
if (SSPCON2bits.ACKSTAT) {PORTD=0b11111011;}//ACKチェック
while (!PIR1bits.SSPIF) {}//終了待ち
}
PIR1bits.SSPIF = 0;//I2C_通信割込みフラグクリア
SSPCON2bits.PEN = 1;//I2C_通信終了
while (SSPCON2bits.PEN) {}//終了待ち
}
糸巻き式自動深さ測定制御編まとめ(1)制御回路と制御ソフトはMPLAB_X_IDE_v2.25とPIC18F4553マイコンの復習、16章:高温用温度レコーダの製作をベースに修正しました。
(2)コパルステッピングモーター SPG27-1702の制御に関しては19章:ステッピングモーターの制御を参照しました。
(3)測定データのEPROMへの書込みはタイマー0割込みから呼び出されるvoid Int_Low()関数内で行っています。
(4)void Int_Low()関数内で1バイト書込み関数void Write_EPROM(unsigned short addr,unsigned char send_data)を多数回実行するとタイミング的な不具合が発生しました。
(5)N個のgEPdata[i]を同時にEPROMに書込みをvoid Write_EPROM_N(unsigned short addr,unsigned char N)の1回呼び出しに変更しました。
(6)原因がよくわからないのですが、USBを接続状態でリセットすると、EPROMに記録したデータが変化することがあります。 電源ON/OFFとリセット時はUSBをはずした方が安全です。
(7)実働評価結果において
*荷重変動は起動時に大きく、徐々に減衰する。
*水面に達すると僅かに荷重が減少する。
*水底に達すると荷重は大きく振動しながら、高さは一定に保たれる。
等が確認できました。
 22章:3次元パソコン制御ルータ加工機の製作(1)ルータ編に行く。
22章:3次元パソコン制御ルータ加工機の製作(1)ルータ編に行く。