加速度センサADXL345とHMC5883Lコンパス使用低コスト回路を検討してみました。
 基板組込時に不可欠な部品と価格
基板組込時に不可欠な部品と価格Arduino UNOでデバッグが完了した場合、基板組込に不可欠な部品は以下のとおりです。
(1)AVRマイコンATMEGA328P-PU 1個 小計¥250
(2)クリスタル(水晶発振子)16MHz 1個 小計¥30
(3)コンデンサー 22pF 2個 小計¥20
合計¥300と安価となります。
AVRマイコンATMEGA328P-PUへのブートローダ書込みの必要性Arduino UNOでAVRマイコンATMEGA328P-PUにスケッチを書き込むには、あらかじめAVRマイコンATMEGA328P-PUへブートローダを書込む必要があります。
あらかじめブートローダを書込み済みのAVRマイコンATMEGA328P-PUもあるそうですが、¥250のAVRマイコンATMEGA328P-PUには書き込まれていませんでした。
書き込み方法の詳細は57章:AVRマイコンATMEGA328P-PUへのブートローダの書込み方法を参照ねがいます。
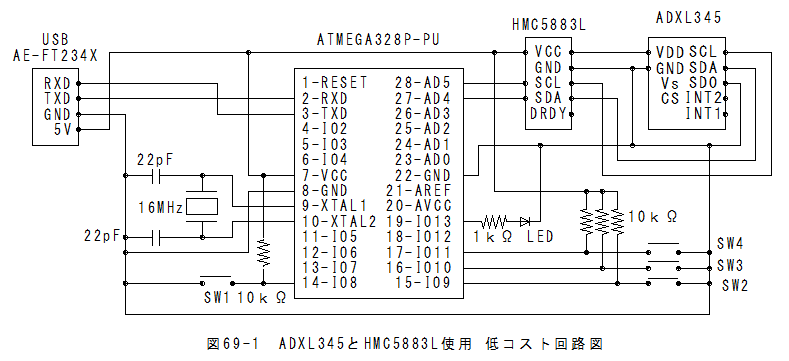
加速度センサADXL345とHMC5883Lコンパス使用低コスト回路図押しボタンスイッチを4個にしました。
加速度センサADXL345とHMC5883Lコンパス使用低コスト回路図
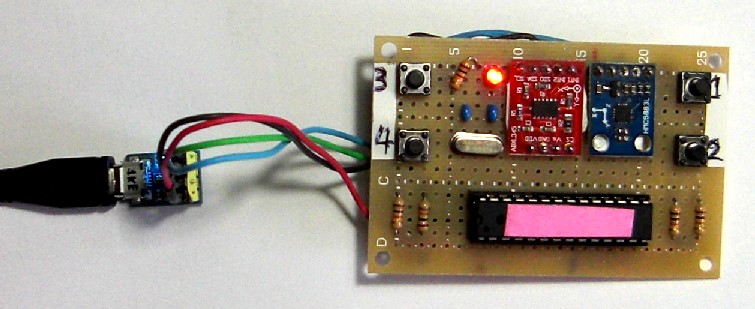
 万能基板組込回路外観
万能基板組込回路外観万能基板組込回路外観を以下に示します。
 「Adafrut ADXL345」ライブラリーのインストール
「Adafrut ADXL345」ライブラリーのインストール64章:3軸加速度センサモジュール ADXL345(SPI/IIC)を参照願います。
「Adafruit_HMC5883_Unified」ライブラリーのインストール60章:HMC5883L 使用 3軸 デジタル・コンパス モジュール (3-5V 動作)を参照願います。
ArduinoスケッチArduinoスケッチは以下となります。
//ADXL345_HMC5883L_V1
#include <Wire.h>
#include <Adafruit_Sensor.h>
#include <Adafruit_HMC5883_U.h>
#include <Adafruit_ADXL345_U.h>
#define LED_PIN 13
static bool blinkState = false;
#define SW1_PIN 8
#define SW2_PIN 9
#define SW3_PIN 10
#define SW4_PIN 11
Adafruit_HMC5883_Unified mag = Adafruit_HMC5883_Unified(12345);
Adafruit_ADXL345_Unified accel = Adafruit_ADXL345_Unified(12345);
void setup()
{
pinMode(LED_PIN, OUTPUT);
pinMode(SW1_PIN, INPUT);pinMode(SW2_PIN, INPUT);
pinMode(SW3_PIN, INPUT);pinMode(SW4_PIN, INPUT);
Serial.begin(38400);
if(!mag.begin()){while(1);}
if(!accel.begin()) {while(1);}
delay(500);
}
void loop()
{
float SX[6];
int i,N=100;
sensors_event_t event1;
accel.getEvent(&event1);
sensors_event_t event2;
mag.getEvent(&event2);
int SW1=digitalRead(SW1_PIN);int SW2=digitalRead(SW2_PIN);
int SW3=digitalRead(SW3_PIN);int SW4=digitalRead(SW4_PIN);
if (Serial.available() > 0)
{
int inByte = Serial.read();
for(i=0;i<6;i++){SX[i]=0;}
for(i=0;i<N;i++)
{
SX[0]+=event1.acceleration.x;
SX[1]+=event1.acceleration.y;
SX[2]+=event1.acceleration.z;
SX[3]+=event2.magnetic.y;
SX[4]+=event2.magnetic.x;
}
float Hx = 100*atan2(SX[0]/N, SX[2]/N);
float Hy = 100*atan2(SX[1]/N, SX[2]/N);
float Hz = 100*atan2(SX[3]/N, SX[4]/N);
Serial.print(Hx); Serial.print(",");
Serial.print(Hy); Serial.print(",");
Serial.print(Hz); Serial.print(",");
Serial.print(SW1); Serial.print(",");
Serial.print(SW2); Serial.print(",");
Serial.print(SW3); Serial.print(",");
Serial.println(SW4);
blinkState = !blinkState;// blink LED to indicate activity
if(SW1==LOW){blinkState=HIGH;}
digitalWrite(LED_PIN, blinkState);
}
delay(50);
}
Arduinoスケッチ_テキストファイルArduinoスケッチ_テキストファイルは以下から参照できます。
 Arduinoスケッチ_テキストファイルにいく
Arduinoスケッチ_テキストファイルにいく変更点
(1)例題SerialCallResponseASCII方式のシリアル通信にしました。
(2)HxとHyは加速度センサー、Hzはコンパスから求めています。
(3)押しボタンスイッチ4個としました。。
ProcessingのスケッチIntegration_ADXL345_HMC5883L.pdeのスケッチを以下に示します。
//Integration_ADXL345_HMC5883L
import processing.serial.*;
Serial myPort; // The serial port
float My=0;
float Mz=0;
float Mx=0;
float Py=0;
float Pz=0;
float Px=0;
import controlP5.*;
ControlP5 cp5;
DropdownList d1;
int mode;
float scale;
int gSW2=1;
MyJet MyJet;//使用クラスの定義
Yacht Yacht;
Train Train;
Engin Engin;
BirdBox BirdBox;
GuardRail GuardRail;
SolarUnits SolarUnits;
TrussStructure TrussStructure;
void setup ()
{
size(1000, 800, P3D);
println(Serial.list());
myPort = new Serial(this, Serial.list()[1], 38400);
myPort.bufferUntil('\n');
MyJet=new MyJet();//MyJetクラスのオブジェクトを生成
Yacht=new Yacht();
Train=new Train();
Engin=new Engin();
BirdBox=new BirdBox();
GuardRail=new GuardRail();
SolarUnits=new SolarUnits();
TrussStructure=new TrussStructure();
noStroke();
cp5 = new ControlP5(this);
cp5.addSlider("scale")
.setPosition(200,0)
.setSize(200,20)
.setRange(0.1,2)
.setColorLabel(color(0))
.setValue(1.0);
d1 = cp5.addDropdownList("List-d1")
.setPosition(0, 0)
.setSize(100,180)
.setItemHeight(20)
.setBarHeight(20)
.addItem("My-Jet", 0)
.addItem("Yacht", 1)
.addItem("Train", 2)
.addItem("Engin", 3)
.addItem("Bird-Box", 4)
.addItem("Guard-Rail", 5)
.addItem("Solar-Units", 6)
.addItem("Truss-Structure", 7);
}
void draw ()
{
pushMatrix();
background(0, 256, 256);
lights();
translate(width / 2, height / 2);
//rotateY(map(mouseX, 0, width, -PI/1, PI/1));
//rotateX(map(mouseY, 0, height, PI/1, -PI/1));
translate(Px,Py,Pz);
rotateX(Mx);
rotateY(Mz);
rotateZ(My);
scale = cp5.getController("scale").getValue();
mode=(int)cp5.getController("List-d1").getValue();
scale(scale,scale,scale);
switch(mode)
{
case(0):MyJet.MyJet();break;
case(1):Yacht.Yacht();break;
case(2):Train.Train();;break;
case(3):Engin.Engin();break;
case(4):BirdBox.BirdBox();break;
case(5):GuardRail.GuardRail();break;
case(6):SolarUnits.SolarUnits();break;
case(7):TrussStructure.TrussStructure();break;
}
popMatrix();
if (myPort.available() <= 0){myPort.write("B");}
}
void controlEvent(ControlEvent theEvent)
{
if (theEvent.isController())
{
println(theEvent.getController()+"\t"+mode+"\t"+ scale);
}
}
void serialEvent(Serial myPort)
{
float r=0.5;
String myString = myPort.readStringUntil('\n');
myString = trim(myString);
float sensors[] = float(split(myString, ','));
for (int sensorNum = 0; sensorNum < sensors.length; sensorNum++)
{
print(sensors[sensorNum] + "\t");
}
println();
if(sensors[3]==1)
{
Mx=Mx*(1-r)+sensors[0]*r/100;//重力方向
My=My*(1-r)+sensors[1]*r/100;//重力方向
if(sensors[0]*sensors[0]+sensors[1]*sensors[1]<40*40)
{
Mz=Mz*(1-r)+(sensors[2]+100)*r/100;//磁力方向
}
}
else
{
Px=Px*(1-r)+400*(sensors[0]/100)*r;//重力方向
Py=Py*(1-r)+400*(sensors[1]/100)*r;//重力方向
if(sensors[0]*sensors[0]+sensors[1]*sensors[1]<40*40)
{
Pz=Pz*(1-r)+400*((sensors[2]+100)/100)*r;//磁力方向
}
}
myPort.write("A");
if(sensors[4]==0)
{
if(gSW2==1)
{
mode++;
if(mode>7){mode=0;}
cp5.getController("List-d1").setValue(mode);
//d1.setValue(mode);
}
gSW2=0;
}
else
{
gSW2=1;
}
if(sensors[5]==0)
{
cp5.getController("scale").setValue(scale+0.01);
delay(10);
}
if(sensors[6]==0)
{
cp5.getController("scale").setValue(scale-0.01);
delay(10);
}
}
加速度センサADXL345とHMC5883Lコンパス使用低コスト回路ファイルファイルは下記の「69-1.zip」ファイルをダウンロードしてください。
 [69-1.zip]をダウンロードする。
[69-1.zip]をダウンロードする。解凍するとIntegration_ADXL345_HMC5883Lフォルダー内に
(1)Integration_ADXL345_HMC5883L.pde
(2)BirdBox.pde
(3)Engin.pde
(4)GuardRail.pde
(5)My_OB.pde
(6)MyJet.pde
(7)SolarUnits.pde
(8)Train.pde
(9)TrussStructure.pde
(9)Yacht.pde
があります。 Integration_ADXL345_HMC5883L.pdeをダブルクリックすると起動します。
動作テスト(1)角度Mx、角度Myは重力方向から求めているため、ドリフトしません。
(2)角度Mzはコンパスから求めていますが、安定性は良くありません。
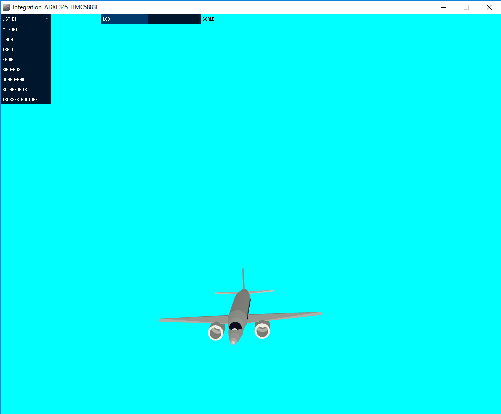
(3)回路基板の角度を変えると、 3Dサンプルの角度Mx、角度My、角度Mzが変化します。
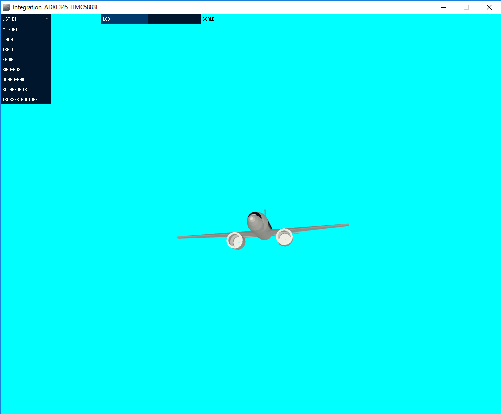
(4)押しボタンスイッチSW1を押すと角度を固定したまま、XYZ方向に移動します。
(5)押しボタンスイッチSW2を押すと、3Dサンプルの画像が変化します。
(6)押しボタンスイッチSW3を押すと表示倍率が大きくなります。
(7)押しボタンスイッチSW4を押すと、表示倍率が小さくなります。
 加速度センサADXL345とHMC5883Lコンパス使用低コスト回路)まとめ
加速度センサADXL345とHMC5883Lコンパス使用低コスト回路)まとめ(1)角度Mx、角度Myは重力方向から求めているため、ドリフトしません。
(2)角度Mzはコンパスから求めていますが、安定性は良くありません。
(3)押しボタンスイッチを4個設置して、より複雑な動作ができるようにしました。
(4)押しボタンスイッチSW1を押すと角度を固定したまま、XYZ方向に移動します。
(5)押しボタンスイッチSW2を押すと、3Dサンプルの画像が変化します。
(6)押しボタンスイッチSW3を押すと表示倍率が大きくなります。
(7)押しボタンスイッチSW4を押すと、表示倍率が小さくなります。