 Arduino演習Communication/SerialCallResponseASCII用スケッチ
Arduino演習Communication/SerialCallResponseASCII用スケッチArduino演習Communication/SerialCallResponseASCII用スケッチは以下となります。
//SerialCallResponseASCII
// This example code is in the public domain.
import processing.serial.*; // import the Processing serial library
Serial myPort; // The serial port
float bgcolor; // Background color
float fgcolor; // Fill color
float xpos, ypos; // Starting position of the ball
void setup() {
size(640,480);
// List all the available serial ports
// if using Processing 2.1 or later, use Serial.printArray()
println(Serial.list());
// I know that the first port in the serial list on my mac
// is always my Arduino module, so I open Serial.list()[0].
// Change the 0 to the appropriate number of the serial port
// that your microcontroller is attached to.
myPort = new Serial(this, Serial.list()[4], 9600);
// read bytes into a buffer until you get a linefeed (ASCII 10):
myPort.bufferUntil('\n');
// draw with smooth edges:
smooth();
}
void draw() {
background(bgcolor);
fill(fgcolor);
// Draw the shape
ellipse(xpos, ypos, 20, 20);
}
// serialEvent method is run automatically by the Processing applet
// whenever the buffer reaches the byte value set in the bufferUntil()
// method in the setup():
void serialEvent(Serial myPort) {
// read the serial buffer:
String myString = myPort.readStringUntil('\n');
// if you got any bytes other than the linefeed:
myString = trim(myString);
// split the string at the commas
// and convert the sections into integers:
int sensors[] = int(split(myString, ','));
// print out the values you got:
for (int sensorNum = 0; sensorNum < sensors.length; sensorNum++) {
print("Sensor " + sensorNum + ": " + sensors[sensorNum] + "\t");
}
// add a linefeed after all the sensor values are printed:
println();
if (sensors.length > 1) {
xpos = map(sensors[0], 0,1023,0,width);
ypos = map(sensors[1], 0,1023,0,height);
fgcolor = sensors[2];
}
// send a byte to ask for more data:
myPort.write("A");
}
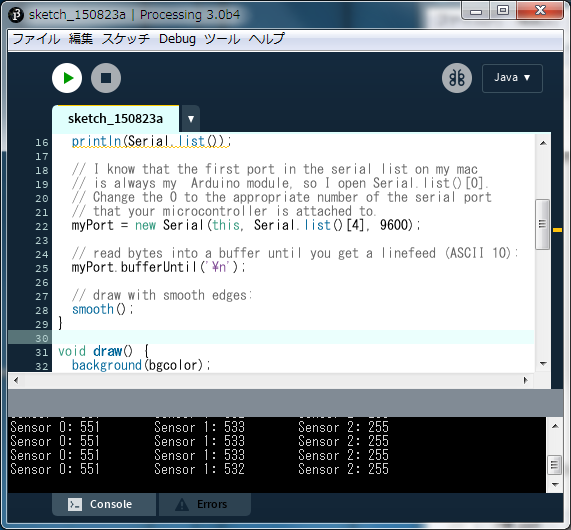
Arduino演習Communication/SerialCallResponseASCII用スケッチの実行(1)PArduino演習Communication/SerialCallResponseASCII用スケッチを実行するとコンソールに
COM1 COM3 COM4 COM5 COM10
と表示されます。
(2)Arduinoと接続のポートはいつもCOM10であり、port = new Serial(this, Serial.list()[4], 9600);とするとつながります。
(3)コンソールには、X位置とY位置とスイッチのON/OFFが表示されます。
(4)スイッチのONのときコンソール画面は以下のようになります。
(5)スイッチがONの時の実行画面は以下のようになります。
 Arduino演習Communication/SerialCallResponseASCII用スケッチまとめ
Arduino演習Communication/SerialCallResponseASCII用スケッチまとめ(1)トラブルなく、動作も安定しています。
(2)起動時のみArduinoからコード"0,0,0\r\n"が送信されます。
(3)パソコン側では、"\n"までの文字列を読み込みます。
(4)パソコン側で受信可能となったら、文字”A”を送信します。
(5)Arduino側で何かの文字を受信したら、X値、Y値、ON/OFFのデータ("549,530,255\r\n")を送信します。
(6)こうすると受信処理が確実に実行できそうです。
 8章:3Dサンプル(sketch_3D_MyJet):に行く。
8章:3Dサンプル(sketch_3D_MyJet):に行く。