 動くおもちゃの原型
動くおもちゃの原型MPLAB_X_IDE_v2.25とPIC18F4553マイコンの復習のマイクロサーボ SG90の応用(10章~13章)で製作したおもちゃを改造しました。
原型では赤外線送受信を使用しまましたが、動作の信頼性がありませんでした。送受信部分を簡単WiFi-UARTモジュール [ESP-WROOM-02]に変更します
WIFI制御動くおもちゃの回路図WIFI制御動くおもちゃの回路図を以下に示します。
電源回路は省略しました。(簡単WiFi-UARTモジュール [ESP-WROOM-02]の3.3V電源は独立に用意しました。)
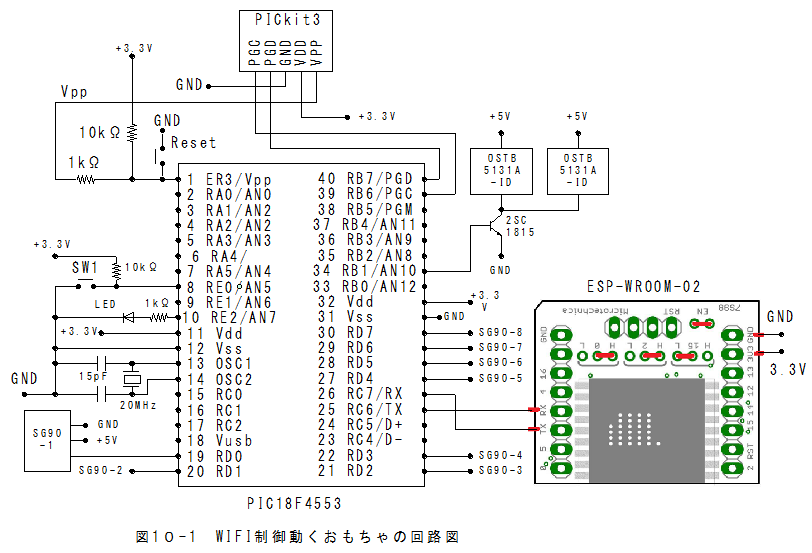 ブレークアウトボードのピン設定
ブレークアウトボードのピン設定(1)ENピン:(Chip Enable.)→Highに設定します。
(2)GPIO-15ピン:(Type I/O MTDO;HSPI_CS; UART0_RTS)→Lowに設定します。
(3)GPIO-2ピン:(Type I/O UART Tx during flash programming)→Highに設定します。
(4)GPIO-0ピン:(Type I/O SPI_CS2)→Highに設定します。
(5)TXピン:(Type I/O GPIO-1)→通信相手のRXに接続
(6)RXピン:(Type I/O GPIO-3)→通信相手のTXに接続
(7)3V3ピン:→3.3V電源供給
(8)GNDピン:→アース
と設定します。
WIFI制御動くおもちゃ外観WIFI制御動くおもちゃ外観を以下に示します。
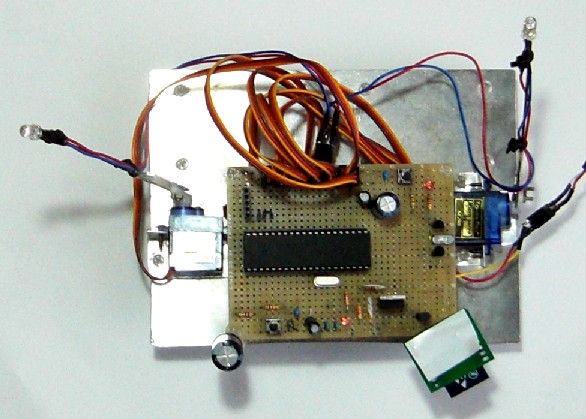
*簡単WiFi-UARTモジュール [ESP-WROOM-02]と2200μFコンデンサは外付けにしました。
PIC18F4553用ソースプログラム今回はUSB通信無しとしたため、ソースプログラムはnewmain.cのみの単純構造となりました。
また、AT+CWJAP="SSID","password"のコマンド送信は1度実行すると記録されているため、省略しました。
詳細は下記の10-1.txtファイルを参照願います。
 [10-1.txt]をダウンロードする。TCPサーバプログラム
[10-1.txt]をダウンロードする。TCPサーバプログラム7章:TCPサーバプログラム自作の検討(3)[7-1.zip]に若干の修正を加えました。
修正プログラムは以下からダウンロードできます。
[10-1.zip]をダウンロードする。解凍するとMyTcpListener-2フォルダーがあります。フォルダー内に
(1)MyTcpListener.sln等のソースファイル群
(2)MyTcpListener-2.exe:実行ファイル
があります。
操作方法(1)WIFI制御動くおもちゃのハードの電源をONします。
(2)MyTcpListener-2.exeをダブルクリックで起動します。
(3)接続ボタンを押します。
(4)WIFI制御動くおもちゃの押しボタンSW1を押します。
(5)接続が完了して以下のようになります。
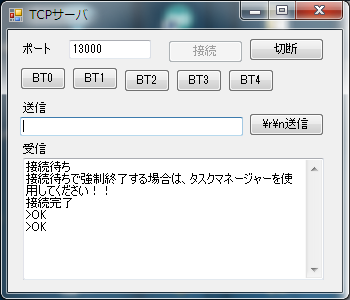
(6)押しボタンを「BT1」「BT2」「BT3」「BT4」「BT0」の順に押すとそれぞれのボタンに応じた動作をします。(BT0で停止)
(7)受信内容は以下のようになります。
接続待ち
接続待ちで強制終了する場合は、タスクマネージャーを使用してください!!
接続完了
>OK
>OK
BT1
BT1=RUN
BT1=RUN
BT1=RUN
BT2
BT2=RUN
BT2=RUN
BT2=RUN
BT3
BT3=RUN
BT3=RUN
BT3=RUN
BT4
BT4=RUN
BT4=RUN
BT4=RUN
BT0
WIFI制御動くおもちゃの製作まとめ(1)MPLAB_X_IDE_v2.25とPIC18F4553マイコンの復習のマイクロサーボ SG90の応用(10章~13章)で製作したおもちゃを改造しました。
(2)思いのほかすんなりと動作しました。
(3)通信動作は非常に安定しています。
(4)PIC18F4553マイコンのソースプログラムはUSB通信を使用しないため、newmain.cのみの単純構造となりました。
(5)操作もかなり単純化されました。
(6)動くおもちゃの動作は単純なものですが、簡単WiFi-UARTモジュール [ESP-WROOM-02]を使用したWIFI制御は非常に有効です。
 11章:WIFI制御自動彫刻機の製作に行く。
11章:WIFI制御自動彫刻機の製作に行く。