 �R�������x�Z���T���W���[��ADXL345�̎Q�l�A�h���X
�R�������x�Z���T���W���[��ADXL345�̎Q�l�A�h���X�U�S�́F�R�������x�Z���T���W���[���@�`�c�w�k�R�S�T�i�r�o�h�^�h�h�b�j
�@Arduino UNO��ESP-WROOM-02��I2C����ɂ����āA���S�݊��ƂȂ��Ă���悤�ł��B�������AESP-WROOM-02�̃V���A���ʐM�̃{�|���[�g��115200bps�ɐݒ肷��K�v������܂��B
�R�������x�Z���T���W���[��ADXL345�����H�}�@�R�������x�Z���T���W���[��ADXL345�����H�}���ȉ��Ɏ����܂��B
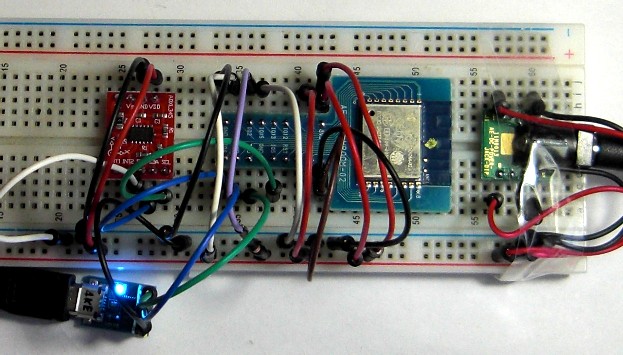
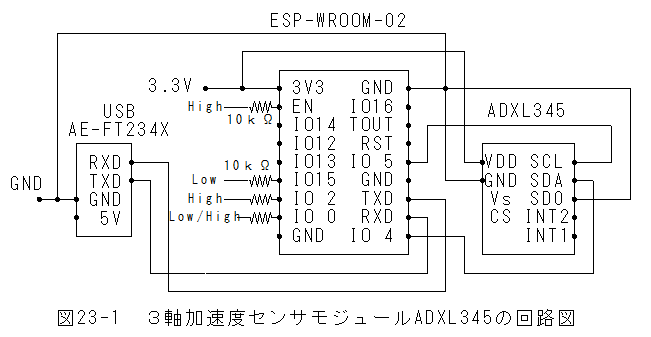 �R�������x�Z���T���W���[��ADXL345�����H�}�O��
�R�������x�Z���T���W���[��ADXL345�����H�}�O���@�R�������x�Z���T���W���[��ADXL345�����H�}�O�ς��ȉ��Ɏ����܂��B
 Arduino�X�P�b�`�̏�����
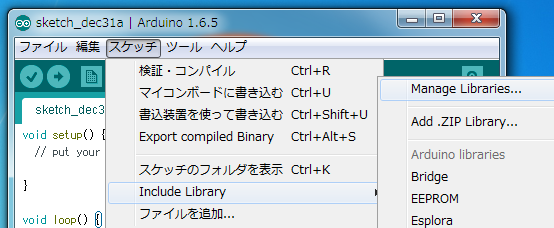
Arduino�X�P�b�`�̏������i�P�j�u�X�P�b�`�v�Q�uInclude Library�v�Q�uManage Libraries�v��I�����܂��B
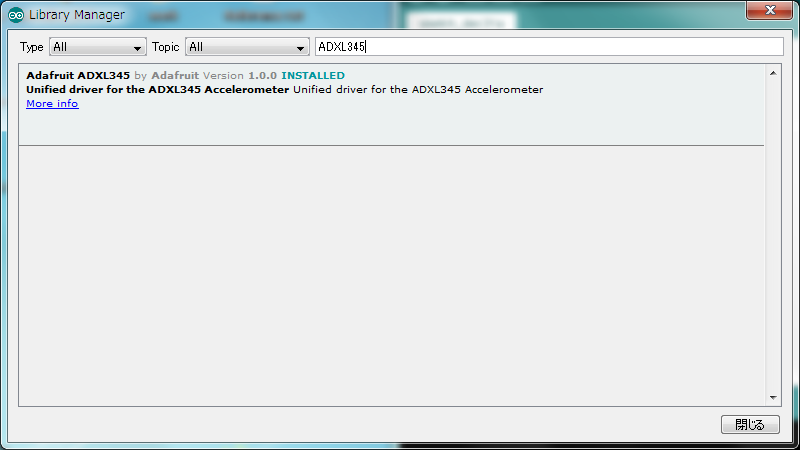
�i�Q�j��������ADXL345�Ɠ��͂��܂��B
�i�R�j�uInstall�v�{�^���������܂��B
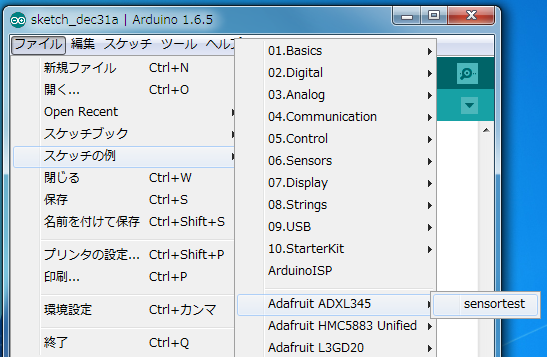
�i�S�j�u�t�@�C���v�Q�u�X�P�b�`�̗�v�Q�uAdafrut ADXL345�v�Q�usensortest�v��I�����܂��B
�i�T�jSerial.begin(9600);��Serial.begin(115200);�ɕύX���܂��B
�i�U�jGPIO-0�s���F�iType�@I/O�@SPI_CS2)��Low(10k���v���_�E���j�ɐݒ肵�AESP-WROOM-02�̓d���𓊓����܂��B
�i�V�j�X�P�b�`�������݂܂��B
���쎎���i�P�jarduino.exe���N�����āA�V���A�����j�^���J���܂��B
�i�Q�jGPIO-0�s���F�iType�@I/O�@SPI_CS2)��High(10k���v���A�b�v�j�ɖ߂��AESP-WROOM-02�̓d�����ē������܂�
�i�R�j�V���A�����j�^�[���J���{�[���[�g115200bps�ɐݒ肵�܂��B
�i�S�j�ȉ��̌��ʂ��\������܂��B
X: 0.31 Y: 0.16 Z: 9.30 m/s^2 X: 0.35 Y: 0.20 Z: 9.53 m/s^2 X: 0.31 Y: 0.08 Z: 9.38 m/s^2 X: 0.31 Y: 0.08 Z: 9.38 m/s^2 X: 0.27 Y: 0.08 Z: 9.34 m/s^2 X: 0.27 Y: 0.12 Z: 9.38 m/s^2 X: 0.35 Y: 0.16 Z: 9.30 m/s^2 X: 0.31 Y: 0.08 Z: 9.30 m/s^2 X: 0.27 Y: 0.12 Z: 9.38 m/s^2 X: 0.31 Y: 0.12 Z: 9.30 m/s^2 X: 0.31 Y: 0.12 Z: 9.34 m/s^2 X: 0.27 Y: 0.12 Z: 9.38 m/s^2 X: 0.27 Y: 0.16 Z: 9.41 m/s^2 X: 0.31 Y: 0.12 Z: 9.38 m/s^2 X: 0.35 Y: 0.08 Z: 9.38 m/s^2 X: 0.31 Y: 0.16 Z: 9.26 m/s^2 X: 0.24 Y: 0.20 Z: 9.41 m/s^2 X: 0.31 Y: 0.12 Z: 9.41 m/s^2 X: 0.27 Y: 0.08 Z: 9.30 m/s^2 X: 0.27 Y: 0.16 Z: 9.34 m/s^2 X: 0.31 Y: 0.08 Z: 9.38 m/s^2 X: 0.27 Y: 0.12 Z: 9.41 m/s^2 X: 0.31 Y: 0.12 Z: 9.34 m/s^2 X: 0.31 Y: 0.08 Z: 9.38 m/s^2 X: 0.24 Y: 0.12 Z: 9.38 m/s^2 X: 0.27 Y: 0.16 Z: 9.38 m/s^2 X: 0.27 Y: 0.12 Z: 9.34 m/s^2 X: 0.31 Y: 0.16 Z: 9.34 m/s^2 X: 0.27 Y: 0.16 Z: 9.26 m/s^2 X: 0.27 Y: 0.12 Z: 9.38 m/s^2 X: 0.31 Y: 0.16 Z: 9.38 m/s^2 X: 0.27 Y: 0.16 Z: 9.38 m/s^2 X: 0.27 Y: 0.12 Z: 9.34 m/s^2 X: 0.24 Y: 0.20 Z: 9.26 m/s^2 X: 0.35 Y: 0.08 Z: 9.30 m/s^2 X: 0.35 Y: 0.12 Z: 9.34 m/s^2
�R�������x�Z���T���W���[��ADXL345����܂Ƃ��i�P�jArduino UNO��ESP-WROOM-02��I2C����ɂ����āA���S�݊��ƂȂ��Ă���悤�ł��B
�i�Q�j�������AESP-WROOM-02�̃V���A���ʐM�̃{�|���[�g��115200bps�ɐݒ肷��K�v������܂��B
�i�R�jESP-WROOM-02�̃R�X�g�p�t�H�[�}���X�͂��炵���I�I
 �Q�S�́FHMC5883L�g�p�R���f�W�^���E�R���p�X���W���[�������ɍs���B
�Q�S�́FHMC5883L�g�p�R���f�W�^���E�R���p�X���W���[�������ɍs���B