WiFi無線でprocessingの3Dサンプルを動かすを検討します。
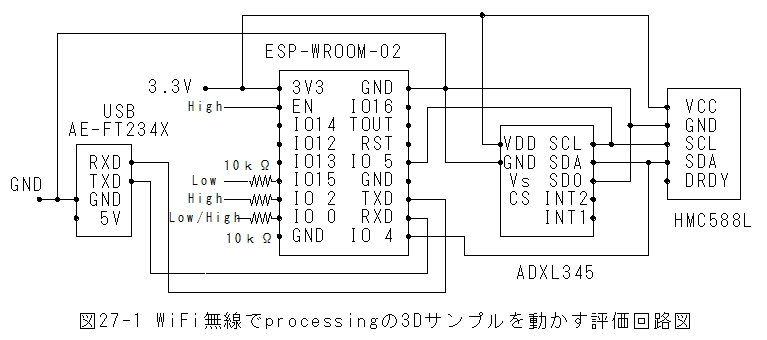
 WiFi無線でprocessingの3Dサンプルを動かす評価回路図
WiFi無線でprocessingの3Dサンプルを動かす評価回路図WiFi無線でprocessingの3Dサンプルを動かす評価回路図を以下に示します。
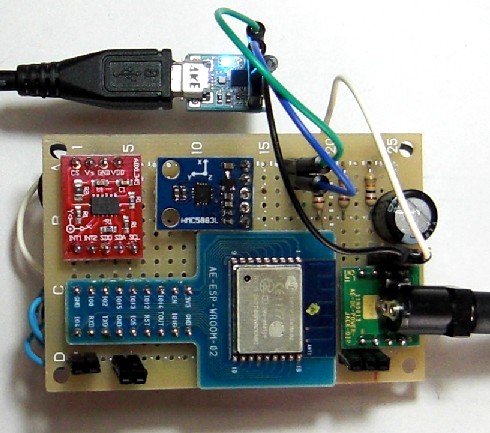
 WiFi無線でprocessingの3Dサンプルを動かす評価回路外観
WiFi無線でprocessingの3Dサンプルを動かす評価回路外観(1)スケッチ書込み時の外観を以下に示します。
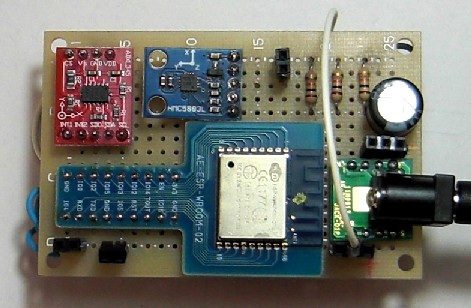
(2)使用時はUSB変換器を外します。
 ESP-WROOM-02用スケッチ
ESP-WROOM-02用スケッチESP-WROOM-02用スケッチは以下となります。
//ADDXL345_HMC5883 27章WiFi無線でprocessingの3Dサンプルを動かす
#include <Wire.h>
#include <Adafruit_Sensor.h>
#include <Adafruit_ADXL345_U.h>
#include <stdio.h>
//WiFiClient 非同期
#include <ESP8266WiFi.h>
const char* ssid = "SSID";//無線LANのSSIDを設定します。
const char* password = "password";//無線LANのpasswordを設定します。
const char* host = "192.168.11.2";//パソコンのIPアドレスを設定します。
const int httpPort = 13000;//TCPサーバのポート
static String gSendText="";
/* Assign a unique ID to this sensor at the same time */
Adafruit_ADXL345_Unified accel = Adafruit_ADXL345_Unified(12345);
#include <Adafruit_HMC5883_U.h>
Adafruit_HMC5883_Unified mag = Adafruit_HMC5883_Unified(12345);
void displaySensorDetails(void)
{
sensor_t sensor;
accel.getSensor(&sensor);
Serial.println("------------------------------------");
Serial.print ("Sensor: "); Serial.println(sensor.name);
Serial.print ("Driver Ver: "); Serial.println(sensor.version);
Serial.print ("Unique ID: "); Serial.println(sensor.sensor_id);
Serial.print ("Max Value: "); Serial.print(sensor.max_value); Serial.println(" m/s^2");
Serial.print ("Min Value: "); Serial.print(sensor.min_value); Serial.println(" m/s^2");
Serial.print ("Resolution: "); Serial.print(sensor.resolution); Serial.println(" m/s^2");
Serial.println("------------------------------------");
Serial.println("");
delay(500);
}
void displayDataRate(void)
{
Serial.print ("Data Rate: ");
switch(accel.getDataRate())
{
case ADXL345_DATARATE_3200_HZ:
Serial.print ("3200 ");
break;
case ADXL345_DATARATE_1600_HZ:
Serial.print ("1600 ");
break;
case ADXL345_DATARATE_800_HZ:
Serial.print ("800 ");
break;
case ADXL345_DATARATE_400_HZ:
Serial.print ("400 ");
break;
case ADXL345_DATARATE_200_HZ:
Serial.print ("200 ");
break;
case ADXL345_DATARATE_100_HZ:
Serial.print ("100 ");
break;
case ADXL345_DATARATE_50_HZ:
Serial.print ("50 ");
break;
case ADXL345_DATARATE_25_HZ:
Serial.print ("25 ");
break;
case ADXL345_DATARATE_12_5_HZ:
Serial.print ("12.5 ");
break;
case ADXL345_DATARATE_6_25HZ:
Serial.print ("6.25 ");
break;
case ADXL345_DATARATE_3_13_HZ:
Serial.print ("3.13 ");
break;
case ADXL345_DATARATE_1_56_HZ:
Serial.print ("1.56 ");
break;
case ADXL345_DATARATE_0_78_HZ:
Serial.print ("0.78 ");
break;
case ADXL345_DATARATE_0_39_HZ:
Serial.print ("0.39 ");
break;
case ADXL345_DATARATE_0_20_HZ:
Serial.print ("0.20 ");
break;
case ADXL345_DATARATE_0_10_HZ:
Serial.print ("0.10 ");
break;
default:
Serial.print ("???? ");
break;
}
Serial.println(" Hz");
}
void displayRange(void)
{
Serial.print ("Range: +/- ");
switch(accel.getRange())
{
case ADXL345_RANGE_16_G:
Serial.print ("16 ");
break;
case ADXL345_RANGE_8_G:
Serial.print ("8 ");
break;
case ADXL345_RANGE_4_G:
Serial.print ("4 ");
break;
case ADXL345_RANGE_2_G:
Serial.print ("2 ");
break;
default:
Serial.print ("?? ");
break;
}
Serial.println(" g");
}
void setup(void)
{
Serial.begin(115200);
Serial.println("Accelerometer Test"); Serial.println("");
/* Initialise the sensor */
if(!accel.begin())
{
/* There was a problem detecting the ADXL345 ... check your connections */
Serial.println("Ooops, no ADXL345 detected ... Check your wiring!");
while(1);
}
/* Set the range to whatever is appropriate for your project */
accel.setRange(ADXL345_RANGE_16_G);
//displaySetRange(ADXL345_RANGE_8_G);
//displaySetRange(ADXL345_RANGE_4_G);
//displaySetRange(ADXL345_RANGE_2_G);
/* Display some basic information on this sensor */
displaySensorDetails();
/* Display additional settings (outside the scope of sensor_t) */
displayDataRate();
displayRange();
Serial.println("");
if(!mag.begin())
{
//Serial.println("Ooops, no HMC5883 detected ... Check your wiring!");
while(1);
}
WiFi.begin(ssid, password);//無線LANに接続要求
while (WiFi.status() != WL_CONNECTED) {//接続完了まで待ちます。
delay(500);
Serial.print(".");
}
Serial.println("");
Serial.println("WiFi connected");
}
void loop(void)
{
/* Get a new sensor event */
sensors_event_t event;
accel.getEvent(&event);
sensors_event_t event2;
mag.getEvent(&event2);
int Xd=(int)(1000*event.acceleration.x);
int Yd=(int)(1000*event.acceleration.y);
int Zd=(int)(1000*event.acceleration.z);
int Mx=(int)(100*event2.magnetic.x);
int My=(int)(100*event2.magnetic.y);
int Mz=(int)(100*event2.magnetic.z);
char str[256];
sprintf(str,"%d,%d,%d,%d,%d,%d\r\n",Xd,Yd,Zd,Mx,My,Mz);
//Serial.print(str);
/* Display the results (acceleration is measured in m/s^2) */
//Serial.print("X: "); Serial.print(Xd); Serial.print(",");
//Serial.print("Y: "); Serial.print(Yd); Serial.print(",");
//Serial.print("Z: "); Serial.print(Zd); Serial.print(",");
//Serial.print("Mx: "); Serial.print(Mx); Serial.print(",");
//Serial.print("My: "); Serial.print(My); Serial.print(",");
//Serial.print("Mz: "); Serial.print(Mz); Serial.print(",");
delay(200);
// Use WiFiClient class to create TCP connections
WiFiClient client;
if (client.connect(host, httpPort))
{
client.print(str);
}
}
ESP-WROOM-02用スケッチテキストファイルESP-WROOM-02用スケッチテキストファイルは以下から参照できます。
 「ESP-WROOM-02用スケッチテキストファイル」にいくArduinoスケッチの書込み
「ESP-WROOM-02用スケッチテキストファイル」にいくArduinoスケッチの書込み(1) 制御回路図を接続します。
(2)Arduinoをダブルクリックで起動します。
(3)ESP-WROOM-02用スケッチをペーストします。
(4)GPIO-0ピン:(Type I/O SPI_CS2)→Low(10kΩプルダウン)に設定し、ESP-WROOM-02の電源を投入します。
(5)スケッチを書込みます。
processing用スケッチprocessing用スケッチは以下となります。
//TCP_Server_ADXL345_HMC5883 27章WiFi無線でprocessingの3Dサンプルを動かす
import processing.net.*;
int port = 13000;
boolean myServerRunning = true;
Server myServer;
import processing.serial.*;
Serial myPort; // The serial port
float Mx=0;
float My=0;
float Mz=0;
int gC=0;int gF=0;int gN=20;
int[] Ax=new int[gN+1];
int[] Ay=new int[gN+1];
int[] Az=new int[gN+1];
float Dx=0,Dy=0,Dz=0;
int gC0=0,gCmax=4;
float Dxnew=0,Dynew=0,Dznew=0,Dxold,Dyold,Dzold;
float Mxnew=0,Mynew=0,Mznew=0,Mxold,Myold,Mzold;
void setup ()
{
size(740, 660, P3D);
myServer = new Server(this, port); // Starts a myServer on port 13000
}
void draw ()
{
int i;
int Sx=0,Sy=0,Sz=0;
background(0, 256, 256);
Client thisClient = myServer.available();
if (thisClient != null)
{
if (thisClient.available() > 0)
{
String myString =thisClient.readString();
myString = trim(myString);
int sensors[] = int(split(myString, ','));
int sensorNum;
for (sensorNum = 0; sensorNum < sensors.length; sensorNum++)
{
print(sensors[sensorNum] + "\t");
}
println();
int f;
if(sensorNum==6){f=1;}
else{f=0;}
if(f==1)
{
Mxold=Mxnew;Mxnew=atan2(sensors[0],sensors[2]);
Myold=Mynew;Mynew=atan2(sensors[1],sensors[2]);
Mzold=Mznew;Mznew=atan2(sensors[4],sensors[3]);
Ax[gC]=sensors[0];
Ay[gC]=sensors[1];
Az[gC]=sensors[2];
if(gF==1)
{
for(i=0;i<gN;i++)
{
Sx=Sx+Ax[i];
Sy=Sy+Ay[i];
Sz=Sz+Az[i];
}
Dxold=Dxnew;Dxnew=0.1*(Ax[gC]-Sx/gN);
Dyold=Dynew;Dynew=0.1*(Ay[gC]-Sy/gN);
Dzold=Dznew;Dznew=0.1*(Az[gC]-Sz/gN);
}
gC++;
if(gC > gN)
{gF=1;gC=0;}
gCmax=gC0;
gC0=0;
}
}
}
if(gF==1)
{
Mx=Mxold+(Mxnew-Mxold)*gC0/gCmax;
My=Myold+(Mynew-Myold)*gC0/gCmax;
Mz=Mzold+(Mznew-Mzold)*gC0/gCmax;
Dx=Dxold+(Dxnew-Dxold)*gC0/gCmax;
Dy=Dyold+(Dynew-Dyold)*gC0/gCmax;
Dz=Dzold+(Dznew-Dzold)*gC0/gCmax;
println(Mx+" " +My +" " +Mz+" "+Dx+" " +Dy +" " +Dz);
}
gC0++;
lights();
translate(width / 2, height / 2,-200);
rotateX(Mx);
rotateY(My);
rotateZ(Mz);
noStroke();
fill(240, 240, 230);
translate(0,0,100);
translate(Dx,Dz,Dy);
OB_A2();//Z軸回転体(胴体)
OB_A3();//Z軸回転体(胴体先端)
OB2();//主翼
OB3();//水平尾翼
OB4();//垂直尾翼
OB_A4();//Z軸回転体(エンジン)
}
void OB_A4()//Z軸回転体(エンジン)
{
int sides=16;//分割数
int Sn=6;//面数
float Pz[]={0,-1,-50,-60,-70,-70};//z座標
float R[]={15,20,20,15,15,1};//回転物半径
int i,j;
float angleIncrement = TWO_PI/sides;
pushMatrix();
translate(60, 36.3,-145);
for(j=0;j<Sn-1;j++)
{
float angle = 0;
beginShape(QUAD_STRIP);
for (i = 0; i < sides + 1; ++i)
{
vertex(R[j]*cos(angle), R[j]*sin(angle), Pz[j]);
vertex(R[j+1]*cos(angle), R[j+1]*sin(angle), Pz[j+1]);
angle += angleIncrement;
}
endShape(CLOSE);
}
popMatrix();
pushMatrix();
translate(-60, 36.3,-145);
for(j=0;j<Sn-1;j++)
{
float angle = 0;
beginShape(QUAD_STRIP);
for (i = 0; i < sides + 1; ++i)
{
vertex(R[j]*cos(angle), R[j]*sin(angle), Pz[j]);
vertex(R[j+1]*cos(angle), R[j+1]*sin(angle), Pz[j+1]);
angle += angleIncrement;
}
endShape(CLOSE);
}
popMatrix();
}
void OB4()//垂直尾翼
{
float Px[]={0,0,3,-3,0,0,2,-2};//ポイントx
float Py[]={0,0,0,0,-80,-80,-80,-80};//ポイントy
float Pz[]={25,-25,0,0,0,-25,-15,-15};//ポイントz
int Sn=10;//面数
int S1[]={0,0,1,1,0,0,1,1,4,5};//面ポイント1
int S2[]={2,4,2,5,3,4,3,5,6,6};//面ポイント2
int S3[]={6,6,5,6,7,7,7,7,7,7};//面ポイント3
int i;
pushMatrix();
translate(0, 0,-395);
for(i=0;i<Sn;i++)
{
beginShape();
vertex(Px[S1[i]], Py[S1[i]],Pz[S1[i]]);
vertex(Px[S2[i]], Py[S2[i]],Pz[S2[i]]);
vertex(Px[S3[i]], Py[S3[i]],Pz[S3[i]]);
endShape(CLOSE);
}
popMatrix();
}
void OB3()//水平尾翼
{
float Px[]={0,0,0,100,100,100};//ポイントx
float Py[]={3,3,-3,2,2,-2};//ポイントy
float Pz[]={15,-15,0,-5,-15,-10};//ポイントz
int Sn=7;//面数
int S1[]={0,0,0,0,1,1,3};//面ポイント1
int S2[]={1,3,2,3,2,4,4};//面ポイント2
int S3[]={4,4,5,5,5,5,5};//面ポイント3
int i;
pushMatrix();
translate(0, 0,-415);
for(i=0;i<Sn;i++)
{
beginShape();
vertex(Px[S1[i]], Py[S1[i]],Pz[S1[i]]);
vertex(Px[S2[i]], Py[S2[i]],Pz[S2[i]]);
vertex(Px[S3[i]], Py[S3[i]],Pz[S3[i]]);
endShape(CLOSE);
}
for(i=0;i<Sn;i++)
{
beginShape();
vertex(-Px[S1[i]], Py[S1[i]],Pz[S1[i]]);
vertex(-Px[S2[i]], Py[S2[i]],Pz[S2[i]]);
vertex(-Px[S3[i]], Py[S3[i]],Pz[S3[i]]);
endShape(CLOSE);
}
popMatrix();
}
void OB2()//主翼
{
float Px[]={10,10,10,220,220,220};//ポイントx
float Py[]={20,20,10,15,15,10};//ポイントy
float Pz[]={40,-40,0,10,-10,0};//ポイントz
int Sn=7;//面数
int S1[]={0,0,0,0,1,1,3};//面ポイント1
int S2[]={1,3,2,3,2,4,4};//面ポイント2
int S3[]={4,4,5,5,5,5,5};//面ポイント3
int i;
pushMatrix();
translate(0, 0,-200);
for(i=0;i<Sn;i++)
{
beginShape();
vertex(Px[S1[i]], Py[S1[i]],Pz[S1[i]]);
vertex(Px[S2[i]], Py[S2[i]],Pz[S2[i]]);
vertex(Px[S3[i]], Py[S3[i]],Pz[S3[i]]);
endShape(CLOSE);
}
for(i=0;i<Sn;i++)
{
beginShape();
vertex(-Px[S1[i]], Py[S1[i]],Pz[S1[i]]);
vertex(-Px[S2[i]], Py[S2[i]],Pz[S2[i]]);
vertex(-Px[S3[i]], Py[S3[i]],Pz[S3[i]]);
endShape(CLOSE);
}
popMatrix();
}
void OB_A3()//Z軸回転体(胴体先端)
{
int sides=16;//分割数
int Sn=8;//面数
float Pz[]={0,-3.2,-11.7,-21.8,-31.9,-45.3,-70.2,-129.4};//z座標
float R[]={0.1,3.7,7.4,9.6,11.8,13.8,17.4,17.7};//回転物半径
int i,j;
float angleIncrement = TWO_PI/sides;
pushMatrix();
translate(0, 8.5);
for(j=0;j<Sn-1;j++)
{
float angle = 0;
beginShape(QUAD_STRIP);
for (i = 0; i < sides + 1; ++i)
{
vertex(R[j]*cos(angle), R[j]*sin(angle), Pz[j]);
vertex(R[j+1]*cos(angle), R[j+1]*sin(angle), Pz[j+1]);
angle += angleIncrement;
}
endShape(CLOSE);
}
popMatrix();
}
void OB_A2()//Z軸回転体(胴体)
{
int sides=16;//分割数
int Sn=13;//面数
float Pz[]={-40,-46.9,-68.4,-88.2,-108.8,-129.4,-319.4,-346.2,-373,-391.2,-409.4,-433,-440};//z座標
float R[]={0.1,7.8,15.4,19.5,22.3,25,25,22.3,18.7,16,13.3,8.3,0.1};//回転物半径
int i,j;
float angleIncrement = TWO_PI/sides;
for(j=0;j<Sn-1;j++)
{
float angle = 0;
beginShape(QUAD_STRIP);
for (i = 0; i < sides + 1; ++i)
{
fill(240, 240, 230);
if(j==1){fill(20, 20, 40);}
if(j==5 && i==0){fill(20, 20, 40);}
if(j==5 && i==8){fill(20, 20, 40);}
if(j==5 && i==16){fill(20, 20, 40);}
vertex(R[j]*cos(angle), R[j]*sin(angle), Pz[j]);
vertex(R[j+1]*cos(angle), R[j+1]*sin(angle), Pz[j+1]);
angle += angleIncrement;
}
endShape(CLOSE);
}
}
processing用スケッチテキストファイルprocessing用スケッチテキストファイルは以下から参照できます。
「processing用スケッチテキストファイル」にいく動作試験(1)processing用スケッチをRunします。
(2)シリアルモニターを開きボーレート115200bpsに設定します。
(3)GPIO-0ピン:(Type I/O SPI_CS2)→High(10kΩプルアップ)に戻し、ESP-WROOM-02の電源を再投入します
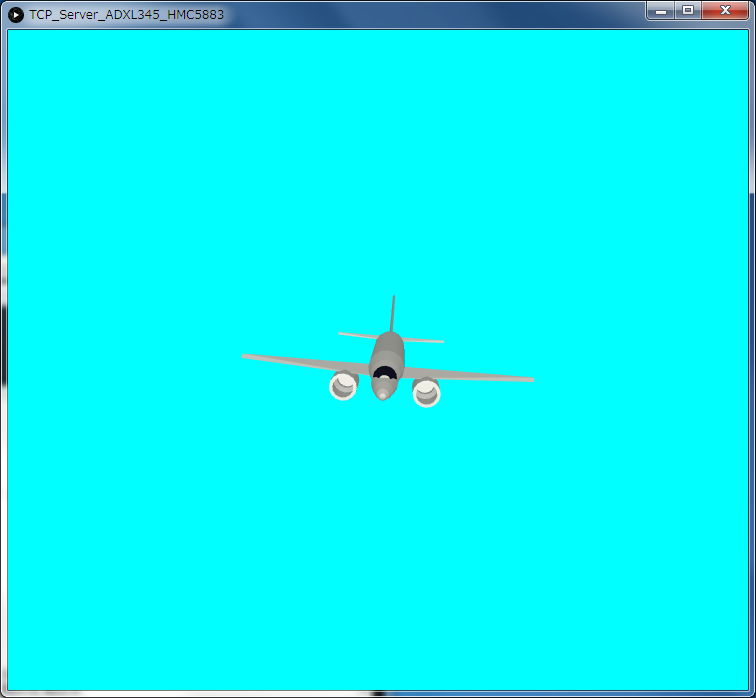
(4)ESP-WROOM-02を動かすと3D画像の3軸方向回転と3軸方向位置が変化します。
 WiFi無線でprocessingの3Dサンプルを動かすまとめ
WiFi無線でprocessingの3Dサンプルを動かすまとめ(1)WiFi無線の送信間隔を短くすると動作が不安定になりました。
(2)このため、送信間隔を200msとしました。
(3)送信間隔が200ms間隔ですと3D画像の動きが間欠的になります。
(4)3D画像の動きを滑らかにするため、送信間隔の間は補間しました。
(5)加速度センサーの値から水平面からの傾きを計算しました。
(6)加速度センサーの値の変化量をXYZ位置として3D画像を動かしています。
(7)磁気センサーで方位を求めています。
(8)3軸の回転量と3軸の位置は、独立でなく相互に関係しあっています。
(9)このため、思い通りの操作は難しくなっています。