 11章検討結果ファイル
11章検討結果ファイル11章検討結果ファイルは以下からダウンロードできます。
ダウンロード後は解凍してください。
 「 11章検討結果」をダウンロードする。
「 11章検討結果」をダウンロードする。解凍すると「検討結果」フォルダーがあります。
(1)光線追跡.dll :3次元光線追跡計算サブルーチン本体
(2)光線追跡-基本.xls : 3次元光線追跡計算の操作
(3) IN_FM.txt :計算条件表1
(4) IN_FM2.txt :計算条件表2
(5) OUT_M.xls :計算結果
(6)焦点距離計算.xls :焦点距離計算専用VBA
(7)動作条件説明.txt :必要ファイルの説明
(8)光線追跡-等倍2色f100.xls: Φ20mm、f=100mmアクロマートレンズ等倍光学系
(9)光線追跡-等倍3色f100.xls: Φ20mm、f=100mmアポクロマートレンズ等倍光学系
(10)光線追跡-等倍2色f100-像面.xls: Φ20mm、f=100mmアクロマートレンズ等倍光学系像面補正後
(11)光線追跡-等倍3色f100-像面.xls: Φ20mm、f=100mmアポクロマートレンズ等倍光学系像面補正後
(12)像面.xls:像面湾曲の計算結果とグラフ
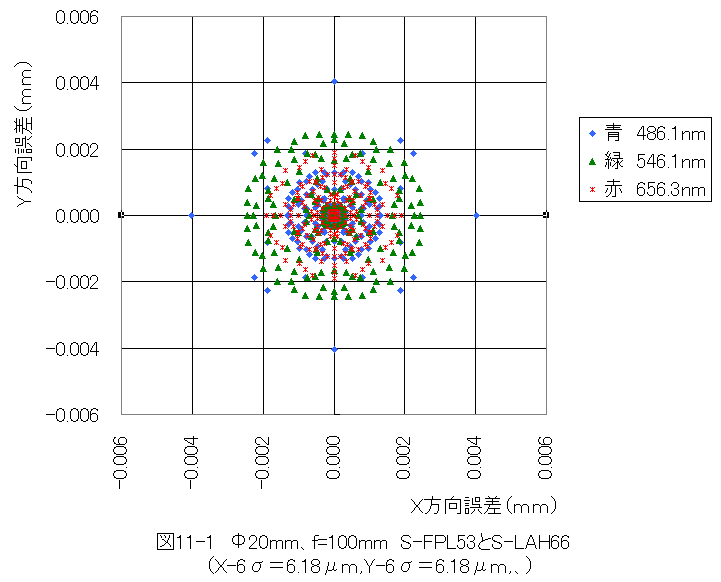
Φ20mm、f=100mmアクロマートレンズ等倍光学系(1)「光線追跡-等倍2色f100.xls 」をダブルクリックでオープンして、シート「IN_FM」をクリックすると光学系の条件が表示されます。
(2)光学ガラスは「S-FPL53」と「 S-LAH66 」を使用しました。
スポットダイアグラム計算条件入力表
| No | 記号 | 値 | 説明 |
| 1 | Mp | 2 | 処理モード(Mp=1入射位置を変数、Mp=2入射角度を変数) |
| 2 | NJ | 8 | 変数範囲の分割数(±NJに分割する) |
| 3 | PR | 0 | 位置変化範囲半径(mm)(Mp=1の時有効) |
| 4 | AR | 0.09 | 角度変化範囲半径(rad)(Mp=2の時有効) |
| 5 | U0 | 0 | 入射X方向角度(rad)(中心光線を決定) |
| 6 | V0 | 0 | 入射Y方向角度(rad)(中心光線を決定) |
| 7 | X0 | 0 | 入射X方向位置(mm)(中心光線を決定) |
| 8 | Y0 | 0 | 入射Y方向位置(mm)(中心光線を決定) |
光学系基本定数表
| L面数 | 9 |
| 波長数 | 3 |
| 面数 | 面種類 | 曲率 | 位置 | オフセットX | オフセットY | 最適化 | 最適化 | 屈折率1 | 屈折率2 | 屈折率3 | - |
| 無次元 | 無次元 | (1/mm) | (mm) | (mm) | (mm) | 条件 | レンズ番号 | 486.1 | 546.1 | 656.3 | - |
| i | M(i) | 1/R(i) | D(i) | Ox(i) | Oy(i) | CaR[i] | CR[i] | 1 | 1 | 1 | - |
| 0 | 0 | 0 | 95.87 | 0 | 0 | V | - | 1 | 1 | 1 | - |
| 1 | 0 | 0.0054 | 2 | 0 | 0 | - | - | 1.78337 | 1.77621 | 1.7678 | S-LAH66 |
| 2 | 0 | 0.0197 | 4 | 0 | 0 | - | - | 1.44195 | 1.43985 | 1.43733 | S-FPL53 |
| 3 | 0 | -0.0281 | 100.19 | 0 | 0 | - | - | 1 | 1 | 1 | - |
| 4 | 0 | 0 | 100.19 | 0 | 0 | - | - | 1 | 1 | 1 | - |
| 5 | 0 | 0.0281 | 4 | 0 | 0 | - | - | 1.44195 | 1.43985 | 1.43733 | S-FPL53 |
| 6 | 0 | -0.0197 | 2 | 0 | 0 | - | - | 1.78337 | 1.77621 | 1.7678 | S-LAH66 |
| 7 | 0 | -0.0054 | 95.87 | 0 | 0 | P | 0 | 1 | 1 | 1 | - |
| 8 | 0 | 0 | 0 | 0 | 0 | - | - | 1 | 1 | 1 | - |
*角度変化範囲AR=0.09としました。
*面数i=4を基準に対称配置としました。
*曲率1/Rは基準面を境に符号が反転します。
*面i=0の最適化条件CaR(0)=Vは焦点位置最適化のため、設定します。
*面i=7の最適化条件CaR(7)=Pは正符号で面i=0と同期変化を意味します。
*最適化レンズ番号CR(7)=0は同期する面番号を指定します。
(3)シート「IN_FM2」をクリックします。
レンズ曲率(1/R)最適化計算入力表
| No | 記号 | 値 | 説明 |
| 1 | RN | 10 | 収束演算繰り返し回数 |
| 2 | DH | 0.000001 | //偏微分を行う際の変化量を設定 |
| 3 | Nray | 11 | 評価光線の本数(MAX100) |
| 4 | Rx | 1 | 目標位置重み |
| 5 | Ru | 0 | 目標角度重み |
| 6 | RN1 | 5 | 曲率半径最適化+軸間距離最適化の曲率半径最適化繰り返し回数 |
| 7 | RN2 | 5 | 曲率半径最適化+軸間距離最適化の軸間距離最適化繰り返し回数 |
| 8 | DH1 | 0.000001 | 曲率半径最適化+軸間距離最適化の軸間距離変化量 |
| - | 入射 | (mm) | 入射 | (rad) | 目標 | (mm) | 目標 | (rad) |
| 連番 | X位置 | Y位置 | X角度 | Y角度 | X位置 | Y位置 | X角度 | Y角度 |
| [i] | X0[i] | Y0[i] | U0[i] | V0[i] | TX[i] | TY[i] | TU[i] | TV[i] |
| 0 | 0 | 0 | 0 | -0.09 | 0 | 0 | 0 | 0 |
| 1 | 0 | 0 | 0 | -0.072 | 0 | 0 | 0 | 0 |
| 2 | 0 | 0 | 0 | -0.054 | 0 | 0 | 0 | 0 |
| 3 | 0 | 0 | 0 | -0.036 | 0 | 0 | 0 | 0 |
| 4 | 0 | 0 | 0 | -0.018 | 0 | 0 | 0 | 0 |
| 5 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 6 | 0 | 0 | 0 | 0.018 | 0 | 0 | 0 | 0 |
| 7 | 0 | 0 | 0 | 0.036 | 0 | 0 | 0 | 0 |
| 8 | 0 | 0 | 0 | 0.054 | 0 | 0 | 0 | 0 |
| 9 | 0 | 0 | 0 | 0.072 | 0 | 0 | 0 | 0 |
| 10 | 0 | 0 | 0 | 0.09 | 0 | 0 | 0 | 0 |
*レンズ中心の焦点位置を求めます。
(4)シート「操作」の「レンズ間隔最適化計算実行」ボタンを押します。
N次元Gauss-Newton法によるレンズ間隔(D)最適化計算結果
| No | E | Xa | Xs | Ya | Ys | D(0) |
| 1 | 0.024 | 0 | 0 | 0 | 0.024 | 95.87 |
| 2 | 0.008 | 0 | 0 | 0 | 0.008 | 96.002 |
| 3 | 0.003 | 0 | 0 | 0 | 0.003 | 96.046 |
| 4 | 0.002 | 0 | 0 | 0 | 0.002 | 96.061 |
| 5 | 0.002 | 0 | 0 | 0 | 0.002 | 96.066 |
| 6 | 0.002 | 0 | 0 | 0 | 0.002 | 96.068 |
| 7 | 0.002 | 0 | 0 | 0 | 0.002 | 96.068 |
| 8 | 0.002 | 0 | 0 | 0 | 0.002 | 96.068 |
| 9 | 0.002 | 0 | 0 | 0 | 0.002 | 96.068 |
| 10 | 0.002 | 0 | 0 | 0 | 0.002 | 96.068 |
(6)シート「操作」の「スポットダイアグラム計算実行」ボタンを押します。
(7) 「光線光線追跡-3色f25.xls」のシート「操作」をクリックし、「スポットダイアグラム計算実行」ボタンを押します。
(8)シート「変換」をクリックするとスポットダイアグラムが表示されます。
(9)シート「IN_FM」をクリックしX0=0.5を設定します。
| No | 記号 | 値 | 説明 |
| 1 | Mp | 2 | 処理モード(Mp=1入射位置を変数、Mp=2入射角度を変数) |
| 2 | NJ | 8 | 変数範囲の分割数(±NJに分割する) |
| 3 | PR | 0 | 位置変化範囲半径(mm)(Mp=1の時有効) |
| 4 | AR | 0.09 | 角度変化範囲半径(rad)(Mp=2の時有効) |
| 5 | U0 | 0 | 入射X方向角度(rad)(中心光線を決定) |
| 6 | V0 | 0 | 入射Y方向角度(rad)(中心光線を決定) |
| 7 | X0 | 0.5 | 入射X方向位置(mm)(中心光線を決定) |
| 8 | Y0 | 0 | 入射Y方向位置(mm)(中心光線を決定) |
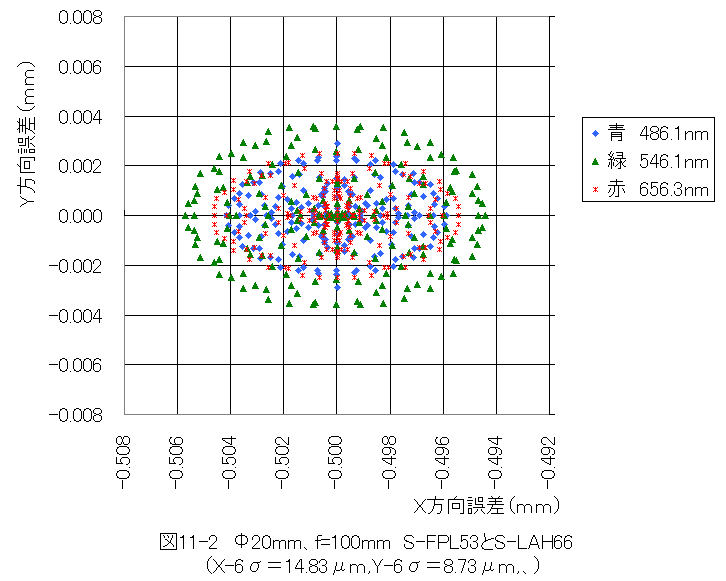
*スポットが楕円形になり、ばらつきが大きくなることが確認できます。
*評価光線の設定と「間隔最適化計算実行」で像面湾曲を調べることができます。
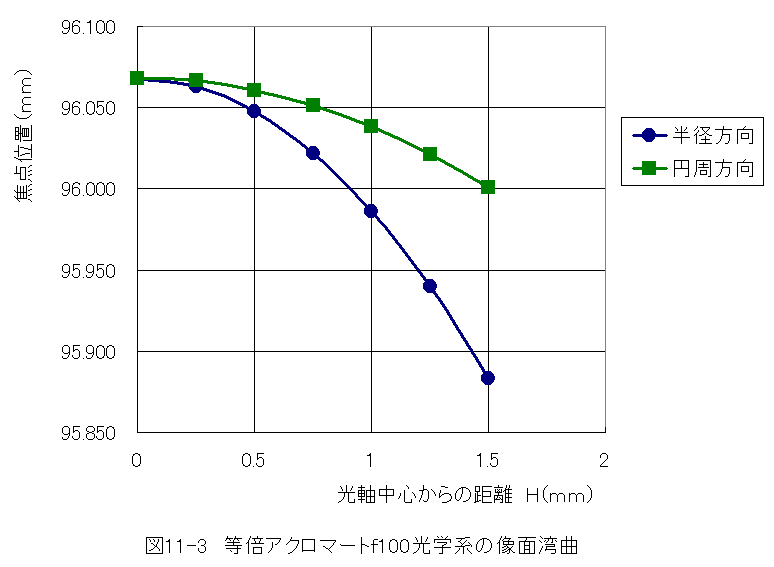
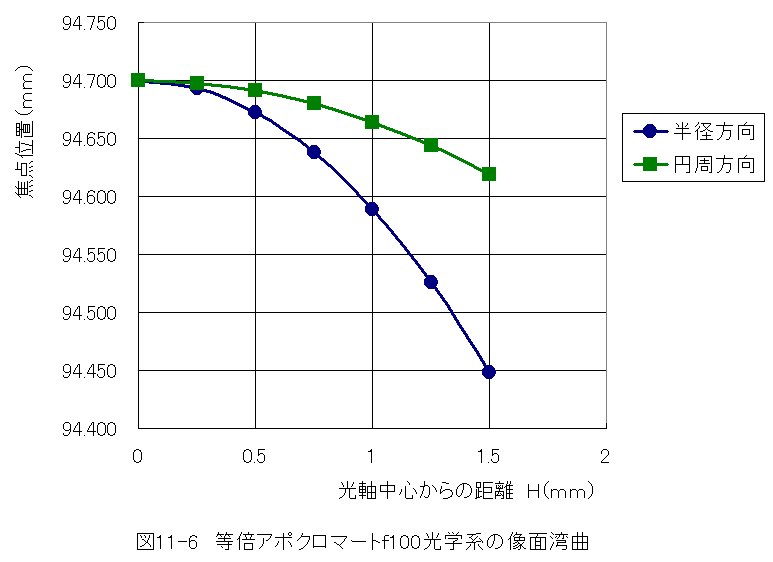
*図11-3から光学中心から離れるに従い、焦点位置が短くなることがわかります。
*半径方向と円周方向で焦点位置が異なってきます、これを非点収差といいます。
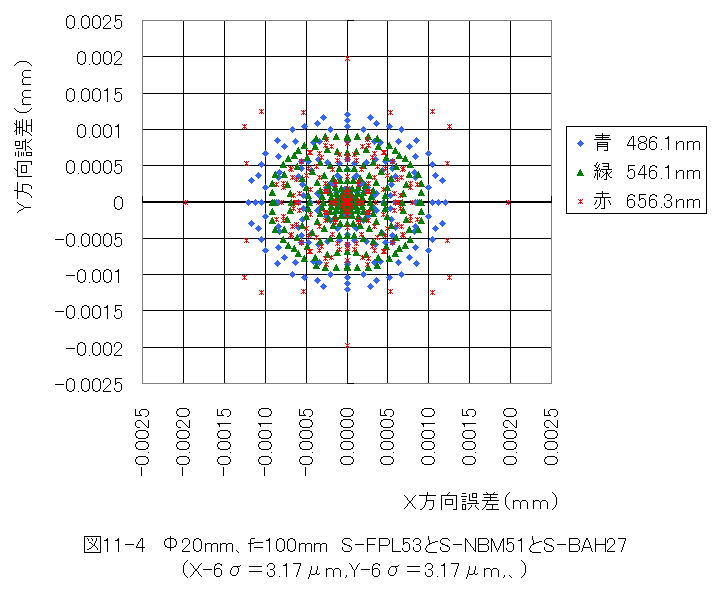
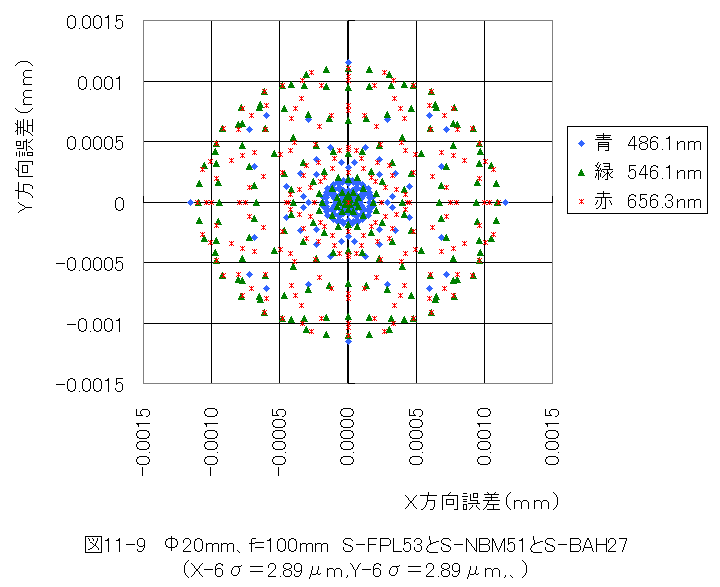
Φ20mm、f=100mmアポクロマートレンズ等倍光学系(1)「光線追跡-等倍3色f100.xls 」をダブルクリックでオープンして、シート「IN_FM」をクリックすると光学系の条件が表示されます。
(2)光学ガラスは「S-FPL53」と「S-NBM51」と「S-BAH27」を使用しました。
スポットダイアグラム計算条件入力表
| No | 記号 | 値 | 説明 |
| 1 | Mp | 2 | 処理モード(Mp=1入射位置を変数、Mp=2入射角度を変数) |
| 2 | NJ | 8 | 変数範囲の分割数(±NJに分割する) |
| 3 | PR | 0 | 位置変化範囲半径(mm)(Mp=1の時有効) |
| 4 | AR | 0.09 | 角度変化範囲半径(rad)(Mp=2の時有効) |
| 5 | U0 | 0 | 入射X方向角度(rad)(中心光線を決定) |
| 6 | V0 | 0 | 入射Y方向角度(rad)(中心光線を決定) |
| 7 | X0 | 0 | 入射X方向位置(mm)(中心光線を決定) |
| 8 | Y0 | 0 | 入射Y方向位置(mm)(中心光線を決定) |
| L面数 | 11 |
| 波長数 | 3 |
| 面数 | 面種類 | 曲率 | 位置 | オフセットX | オフセットY | 最適化 | 最適化 | 屈折率1 | 屈折率2 | 屈折率3 | - |
| 無次元 | 無次元 | (1/mm) | (mm) | (mm) | (mm) | 条件 | レンズ番号 | 486.1 | 546.1 | 656.3 | - |
| i | M(i) | 1/R(i) | D(i) | Ox(i) | Oy(i) | CaR[i] | CR[i] | 1 | 1 | 1 | - |
| 0 | 0 | 0 | 94.7 | 0 | 0 | V | - | 1 | 1 | 1 | - |
| 1 | 0 | 0.00231919 | 4 | 0 | 0 | - | - | 1.71351 | 1.70557 | 1.6965 | S-BAH27 |
| 2 | 0 | -0.0432831 | 2 | 0 | 0 | - | - | 1.62311 | 1.61669 | 1.60925 | S-NBM51 |
| 3 | 0 | 0.0297194 | 4 | 0 | 0 | - | - | 1.44195 | 1.43985 | 1.43733 | S-FPL53 |
| 4 | 0 | -0.0223771 | 98.9 | 0 | 0 | - | - | 1 | 1 | 1 | - |
| 5 | 0 | 0 | 98.9 | 0 | 0 | - | - | 1 | 1 | 1 | - |
| 6 | 0 | 0.0223771 | 4 | 0 | 0 | - | - | 1.44195 | 1.43985 | 1.43733 | S-FPL53 |
| 7 | 0 | -0.0297194 | 2 | 0 | 0 | - | - | 1.62311 | 1.61669 | 1.60925 | S-NBM51 |
| 8 | 0 | 0.0432831 | 4 | 0 | 0 | - | - | 1.71351 | 1.70557 | 1.6965 | S-BAH27 |
| 9 | 0 | -0.00231919 | 94.7 | 0 | 0 | P | 0 | 1 | 1 | 1 | - |
| 10 | 0 | 0 | 0 | 0 | 0 | - | - | 1 | 1 | 1 | - |
*角度変化範囲AR=0.09としました。
*面数i=5を基準に対称配置としました。
*曲率1/Rは基準面を境に符号が反転します。
*面i=0の最適化条件CaR(0)=Vは焦点位置最適化のため、設定します。
*面i=9の最適化条件CaR(9)=Pは正符号で面i=0と同期変化を意味します。
*最適化レンズ番号CR(7)=0は同期する面番号を指定します。
(3)シート「IN_FM2」をクリックします。
* 「光線追跡-等倍2色f100.xls 」と同一です。
(4)シート「操作」の「レンズ間隔最適化計算実行」ボタンを押します。
(5)シート「操作2」の「間隔最適化計算実行」ボタンを押します。
(6)シート「操作」の「スポットダイアグラム計算実行」ボタンを押します。
(7) 「光線光線追跡-3色f25.xls」のシート「操作」をクリックし、「スポットダイアグラム計算実行」ボタンを押します。
(8)シート「変換」をクリックするとスポットダイアグラムが表示されます。
(9)シート「IN_FM」をクリックしX0=0.5を設定します。
(10)シート「操作」の「スポットダイアグラム計算実行」ボタンを押します。
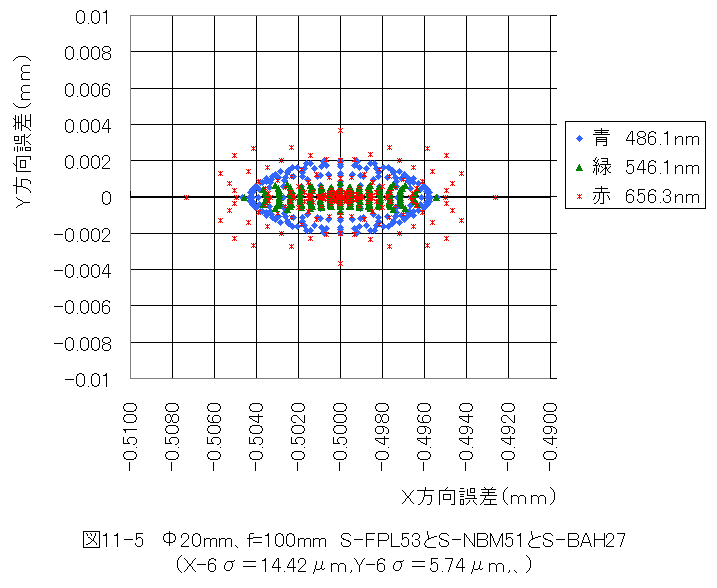
*スポットが楕円形になり、ばらつきが大きくなることが確認できます。
*評価光線の設定と「間隔最適化計算実行」で像面湾曲を調べることができます。
*図11-3から光学中心から離れるに従い、焦点位置が短くなることがわかります。
*半径方向と円周方向で焦点位置が異なってきます、これを非点収差といいます。
アクロマートレンズの像面補正後の像面湾曲*有効レンズ半径9mmの最大開口数NA=0.09ですが、開口数NA=0..06として像面補正を実施しました。
*f=100mm、NA0.06の開口数NA絞りの直径はΦ12mmとなります。
*像面湾曲グラフを以下に示します。
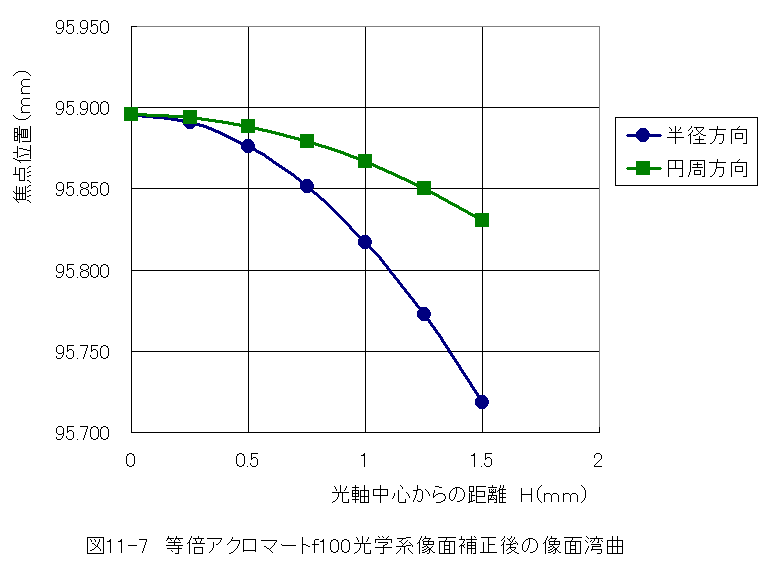
*アクロマートレンズは像面補正前後で、像面湾曲の値がほとんど変化しないことが確認できます。
*アクロマートレンズは曲率半径最適化できる面数が3面で、レンズ中心光束のみで3面の曲率半径が決定されます。
*像面湾曲補正は無理のようです。
アポクロマートレンズの像面補正後の像面湾曲*有効レンズ半径9mmの最大開口数NA=0.09ですが、開口数NA=0..06として像面補正を実施しました。
*f=100mm、NA0.06の開口数NA絞りの直径はΦ12mmとなります。
*像面湾曲グラフを以下に示します。
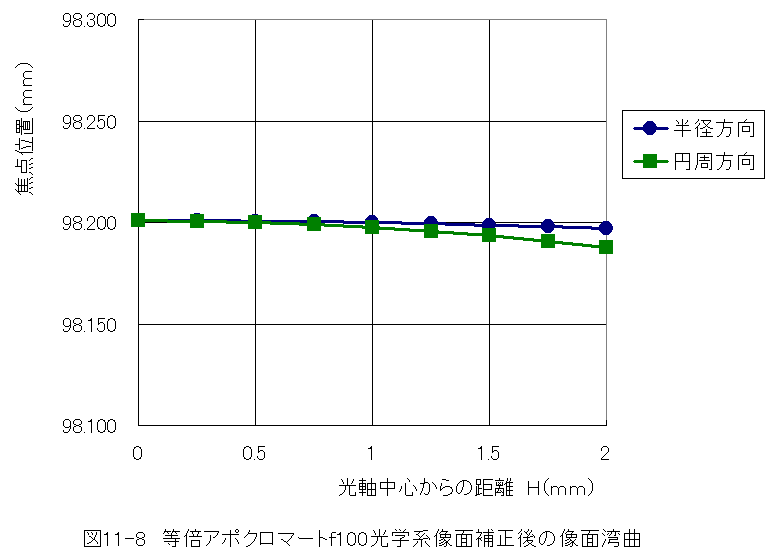
*アポクロマートレンズは像面補正前後で、像面湾曲の値が大幅に改善していることが確認できます。
*アポクロマートレンズは像面湾曲補正が有効です。
像面補正後 Φ20mm、f=100mmアポクロマートレンズ等倍光学系(1)「光線追跡-等倍3色f100-像面.xls 」をダブルクリックでオープンして、シート「IN_FM」をクリックすると光学系の条件が表示されます。
(2)光学ガラスは「S-FPL53」と「S-NBM51」と「S-BAH27」を使用しました。
スポットダイアグラム計算条件入力表
| No | 記号 | 値 | 説明 |
| 1 | Mp | 2 | 処理モード(Mp=1入射位置を変数、Mp=2入射角度を変数) |
| 2 | NJ | 8 | 変数範囲の分割数(±NJに分割する) |
| 3 | PR | 0 | 位置変化範囲半径(mm)(Mp=1の時有効) |
| 4 | AR | 0.06 | 角度変化範囲半径(rad)(Mp=2の時有効) |
| 5 | U0 | 0 | 入射X方向角度(rad)(中心光線を決定) |
| 6 | V0 | 0 | 入射Y方向角度(rad)(中心光線を決定) |
| 7 | X0 | 0 | 入射X方向位置(mm)(中心光線を決定) |
| 8 | Y0 | 0 | 入射Y方向位置(mm)(中心光線を決定) |
| L面数 | 11 |
| 波長数 | 3 |
| 面数 | 面種類 | 曲率 | 位置 | オフセットX | オフセットY | 最適化 | 最適化 | 屈折率1 | 屈折率2 | 屈折率3 | - |
| 無次元 | 無次元 | (1/mm) | (mm) | (mm) | (mm) | 条件 | レンズ番号 | 486.1 | 546.1 | 656.3 | - |
| i | M(i) | 1/R(i) | D(i) | Ox(i) | Oy(i) | CaR[i] | CR[i] | 1 | 1 | 1 | - |
| 0 | 0 | 0 | 98.2 | 0 | 0 | - | - | 1 | 1 | 1 | - |
| 1 | 0 | 0.0142871 | 4 | 0 | 0 | V | - | 1.71351 | 1.70557 | 1.6965 | S-BAH27 |
| 2 | 0 | 0.00938964 | 2 | 0 | 0 | V | - | 1.62311 | 1.61669 | 1.60925 | S-NBM51 |
| 3 | 0 | 0.0298416 | 4 | 0 | 0 | V | - | 1.44195 | 1.43985 | 1.43733 | S-FPL53 |
| 4 | 0 | -0.0138865 | 95.3 | 0 | 0 | V | - | 1 | 1 | 1 | - |
| 5 | 0 | 0 | 95.3 | 0 | 0 | - | - | 1 | 1 | 1 | - |
| 6 | 0 | 0.0138865 | 4 | 0 | 0 | M | 4 | 1.44195 | 1.43985 | 1.43733 | S-FPL53 |
| 7 | 0 | -0.0298416 | 2 | 0 | 0 | M | 3 | 1.62311 | 1.61669 | 1.60925 | S-NBM51 |
| 8 | 0 | -0.00938964 | 4 | 0 | 0 | M | 2 | 1.71351 | 1.70557 | 1.6965 | S-BAH27 |
| 9 | 0 | -0.0142871 | 98.2 | 0 | 0 | M | 1 | 1 | 1 | 1 | - |
| 10 | 0 | 0 | 0 | 0 | 0 | - | - | 1 | 1 | 1 | - |
*角度変化範囲AR=0.09としました。
*面数i=5を基準に対称配置としました。
*曲率1/Rは基準面を境に符号が反転します。
*面i=1~4の最適化条件CaR=Vは曲率最適化のため、設定します。
*面i=6~9の最適化条件CaR=Mは逆符号で面i=1~4と同期変化を意味します。
*最適化レンズ番号CR=1~4は同期する面番号を指定します。
(3)シート「IN_FM2」をクリックします。
レンズ曲率(1/R)最適化計算入力表
| No | 記号 | 値 | 説明 |
| 1 | RN | 10 | 収束演算繰り返し回数 |
| 2 | DH | 0.000001 | //偏微分を行う際の変化量を設定 |
| 3 | Nray | 35 | 評価光線の本数(MAX100) |
| 4 | Rx | 1 | 目標位置重み |
| 5 | Ru | 0 | 目標角度重み |
| 6 | RN1 | 5 | 曲率半径最適化+軸間距離最適化の曲率半径最適化繰り返し回数 |
| 7 | RN2 | 5 | 曲率半径最適化+軸間距離最適化の軸間距離最適化繰り返し回数 |
| 8 | DH1 | 0.000001 | 曲率半径最適化+軸間距離最適化の軸間距離変化量 |
| - | 入射 | (mm) | 入射 | (rad) | 目標 | (mm) | 目標 | (rad) |
| 連番 | X位置 | Y位置 | X角度 | Y角度 | X位置 | Y位置 | X角度 | Y角度 |
| [i] | X0[i] | Y0[i] | U0[i] | V0[i] | TX[i] | TY[i] | TU[i] | TV[i] |
| 0 | 0 | 0 | -0.06 | 0 | 0 | 0 | 0 | 0 |
| 1 | 0 | 0 | -0.04 | 0 | 0 | 0 | 0 | 0 |
| 2 | 0 | 0 | -0.02 | 0 | 0 | 0 | 0 | 0 |
| 3 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 4 | 0 | 0 | 0.02 | 0 | 0 | 0 | 0 | 0 |
| 5 | 0 | 0 | 0.04 | 0 | 0 | 0 | 0 | 0 |
| 6 | 0 | 0 | 0.06 | 0 | 0 | 0 | 0 | 0 |
| 7 | 0.5 | 0 | -0.06 | 0 | -0.5 | 0 | 0 | 0 |
| 8 | 0.5 | 0 | -0.04 | 0 | -0.5 | 0 | 0 | 0 |
| 9 | 0.5 | 0 | -0.02 | 0 | -0.5 | 0 | 0 | 0 |
| 10 | 0.5 | 0 | 0 | 0 | -0.5 | 0 | 0 | 0 |
| 11 | 0.5 | 0 | 0.02 | 0 | -0.5 | 0 | 0 | 0 |
| 12 | 0.5 | 0 | 0.04 | 0 | -0.5 | 0 | 0 | 0 |
| 13 | 0.5 | 0 | 0.06 | 0 | -0.5 | 0 | 0 | 0 |
| 14 | 0.5 | 0 | 0 | -0.06 | -0.5 | 0 | 0 | 0 |
| 15 | 0.5 | 0 | 0 | -0.04 | -0.5 | 0 | 0 | 0 |
| 16 | 0.5 | 0 | 0 | -0.02 | -0.5 | 0 | 0 | 0 |
| 17 | 0.5 | 0 | 0 | 0 | -0.5 | 0 | 0 | 0 |
| 18 | 0.5 | 0 | 0 | 0.02 | -0.5 | 0 | 0 | 0 |
| 19 | 0.5 | 0 | 0 | 0.04 | -0.5 | 0 | 0 | 0 |
| 20 | 0.5 | 0 | 0 | 0.06 | -0.5 | 0 | 0 | 0 |
| 21 | 1 | 0 | -0.06 | 0 | -1 | 0 | 0 | 0 |
| 22 | 1 | 0 | -0.04 | 0 | -1 | 0 | 0 | 0 |
| 23 | 1 | 0 | -0.02 | 0 | -1 | 0 | 0 | 0 |
| 24 | 1 | 0 | 0 | 0 | -1 | 0 | 0 | 0 |
| 25 | 1 | 0 | 0.02 | 0 | -1 | 0 | 0 | 0 |
| 26 | 1 | 0 | 0.04 | 0 | -1 | 0 | 0 | 0 |
| 27 | 1 | 0 | 0.06 | 0 | -1 | 0 | 0 | 0 |
| 28 | 1 | 0 | 0 | -0.06 | -1 | 0 | 0 | 0 |
| 29 | 1 | 0 | 0 | -0.04 | -1 | 0 | 0 | 0 |
| 30 | 1 | 0 | 0 | -0.02 | -1 | 0 | 0 | 0 |
| 31 | 1 | 0 | 0 | 0 | -1 | 0 | 0 | 0 |
| 32 | 1 | 0 | 0 | 0.02 | -1 | 0 | 0 | 0 |
| 33 | 1 | 0 | 0 | 0.04 | -1 | 0 | 0 | 0 |
| 34 | 1 | 0 | 0 | 0.06 | -1 | 0 | 0 | 0 |
*光線の角度は-0.06~0.06を設定します。
*光線角度変更は、X角度(半径方向)とY角度(円周方向)に行います。
*評価光線数は35と多くなります。
(4)シート「操作」の「曲率半径最適化計算実行」を押します。
N次元Gauss-Newton法によるレンズ間隔(D)最適化計算結果
| No | E | Xa | Xs | Ya | Ys | 1/R(0) | 1/R(1) | 1/R(2) | 1/R(3) |
| 1 | 0.00068 | 0 | 0.00053 | 0 | 0.00043 | 0.01429 | 0.00939 | 0.02984 | -0.01389 |
| 2 | 0.00068 | 0 | 0.00053 | 0 | 0.00044 | 0.01437 | 0.00937 | 0.02996 | -0.01381 |
| 3 | 0.00068 | 0 | 0.00053 | 0 | 0.00044 | 0.01441 | 0.00936 | 0.03003 | -0.01376 |
| 4 | 0.00068 | 0 | 0.00053 | 0 | 0.00044 | 0.01444 | 0.00936 | 0.03007 | -0.01373 |
| 5 | 0.00068 | 0 | 0.00053 | 0 | 0.00044 | 0.01446 | 0.00936 | 0.03009 | -0.01371 |
| 6 | 0.00068 | 0 | 0.00053 | 0 | 0.00044 | 0.01447 | 0.00935 | 0.03011 | -0.0137 |
| 7 | 0.00068 | 0 | 0.00053 | 0 | 0.00044 | 0.01447 | 0.00935 | 0.03012 | -0.0137 |
| 8 | 0.00068 | 0 | 0.00053 | 0 | 0.00044 | 0.01448 | 0.00935 | 0.03012 | -0.0137 |
| 9 | 0.00068 | 0 | 0.00053 | 0 | 0.00044 | 0.01448 | 0.00935 | 0.03012 | -0.01369 |
| 10 | 0.00068 | 0 | 0.00053 | 0 | 0.00044 | 0.01448 | 0.00935 | 0.03013 | -0.01369 |
(6)シート「操作」をクリックし、「スポットダイアグラム計算実行」ボタンを押します。
(7)シート「変換」をクリックするとスポットダイアグラムが表示されます。
(8)シート「IN_FM」をクリックしX0=2を設定します。
(9)シート「操作」の「スポットダイアグラム計算実行」ボタンを押します。
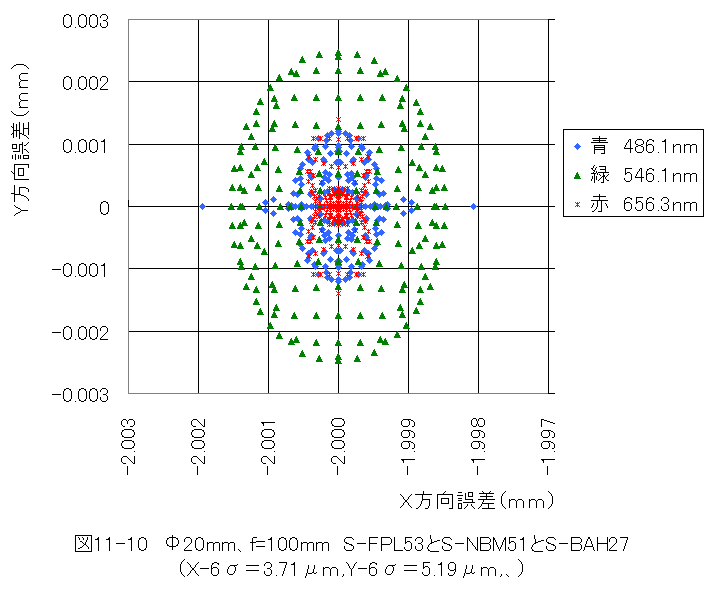
*光軸中心から2mm離れた位置でも、スポットのばらつきが小さいことが確認できます。
f100mm等倍光学系の検討纏め(1)アクロマートレンズは光学ガラスが2種類、レンズ面数が3面と単純なため容易に自動最適化設計が可能です。
(2)アクロマートレンズはレンズ中心の光束のみでレンズの曲率半径が自動最適化できる。
(3)アクロマートレンズ2個を使用した等倍光学系は、レンズ中心で最適化されており像面が湾曲している。
(4)アクロマートレンズ2個を使用した等倍光学系は、像面湾曲補正が有効でない。
(5)アクロマートレンズ2個を使用した等倍光学系は、フィールドサイズを十分大きくするのが難しい。
(6)アポクロマートレンズは光学ガラスが3種類、レンズ面数が4面と複雑になるため、自動最適化設計が難しい。
(7)アポクロマートレンズ2個を使用した等倍光学系は、像面湾曲補正が有効である。
(8)アポクロマートレンズ2個を使用した等倍光学系は、フィールドサイズを大きくしやすい。
(9)性能比較でアポクロマートレンズが優れる。
 12章:f50mm等倍光学系の検討に行く。
12章:f50mm等倍光学系の検討に行く。