無線式アース抵抗レコーダ実用タイプの検討をします!!
 無線式アース抵抗レコーダ回路図
無線式アース抵抗レコーダ回路図無線式アース抵抗レコーダ回路図を以下に示します。
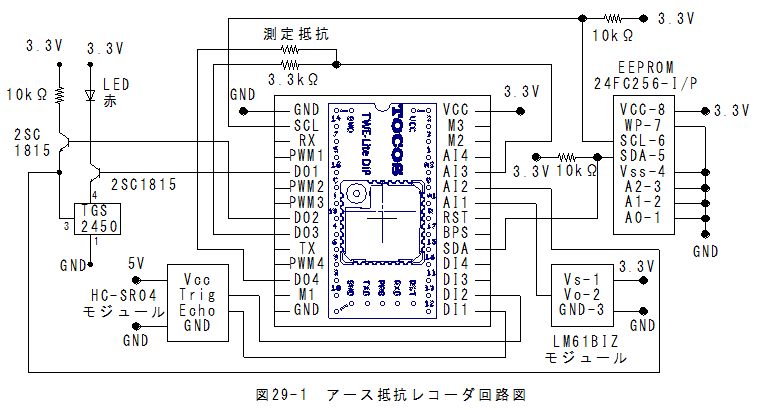
無線によるデータ収集を想定しているため、ToCoStick(トコスティック)が1個、ZigBeeワイヤレスモジュール TWE-Liteが1個必要となります。
ベースプロジェクトは「App_TweLite」を使用します。
EEPROMの詳細仕様は下記を参照します。
 [29-1.pdf]をダウンロードする。
[29-1.pdf]をダウンロードする。| 品名 | 単価 | 個数 | 小計 | 購入先 |
| HC-SR04 超音波距離センサーモジュール | 475 | 1 | 475 | アマゾン |
| ZigBeeワイヤレスモジュール TWE-Lite Dip-WA (半完成品セミキット) | 1620 | 1 | 1620 | 秋月電子通商 |
| USBアダプター TWE-Lite R(トワイ・ライター) | 1890 | 1 | 1890 | 秋月電子通商 |
| 高精度IC温度センサLM61BIZ(4個入) | 50 | 1 | 50 | 秋月電子通商 |
| においセンサ TGS2450 | 300 | 1 | 300 | 秋月電子通商 |
| トランジスター2SC1815Y(60V150mA)(10個入テーピング品) | 8 | 2 | 16 | 秋月電子通商 |
| 赤色LED 3mm OSDR3133A 500mcd 30度100個入 | 3.5 | 1 | 3.5 | 秋月電子通商 |
| カーボン抵抗(炭素皮膜抵抗) 1/4W10kΩ (100本入) | 1 | 1 | 1 | 秋月電子通商 |
| シリアルIスケアC EEPROM 24FC256-I/P | 40 | 1 | 40 | 秋月電子通商 |
| ICソケット ( 8P) (10個入) | 10 | 1 | 10 | 秋月電子通商 |
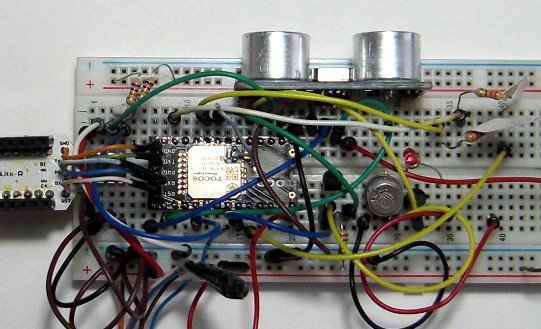
無線式アース抵抗レコーダ外観無線式アース抵抗レコーダ外観を以下に示します。(とりあえず仮配線で評価します。)
 無線式アース抵抗レコーダプログラムのダウンロード
無線式アース抵抗レコーダプログラムのダウンロード完成プログラムは「40-29.zip」ファイルをダウンロードしてください。
[40-29.zip]をダウンロードする。解凍するとフォルダー内に
App_TweLitegフォルダー
Win-PingPongフォルダー
App_TweLite_Master_JN5164_TOCOSTICK_1_6_5.bin(24章と同じでToCoStick(トコスティック)用)
があります。
ToCoStick(トコスティック)用がApp_TweLite_Master_JN5164_TOCOSTICK_1_6_5.bin
ZigBeeワイヤレスモジュール TWE-Lite用が\App_TweLite\Master\Build\App_TweLite_Master_JN5164_1_6_5.bin
Windowsパソコン用が\Win-PingPong\Win-PingPong.exe です。
基本操作方法(1)\App_TweLite\Master\Build\App_TweLite_Master_JN5164_1_6_5.binを無線マイコンTWE-Lite DIP(トワイライト・ディップ)に書込みます。
(2)App_TweLite_Master_JN5164_TOCOSTICK_1_6_5.binをToCoStick(トコスティック)に書き込みます。(方法は7章:ToCoNet(トコネット)のソフトウエア開発環境(SDK) とPingPongの実行プログラムの書込みを参照願います。
(3)ToCoStick(トコスティック)をパソコンに接続します。
(4)「Win-PingPong.exe」をダブルクリックで起動します。
(5)画面の左側を「COM8」にセットして、「Conect」ボタンを押します。
(6)ToCoStick(トコスティック)の設定変更
*ToCoStick(トコスティック)の定期パケット送信はじゃまですので設定変更(インタラクティブ)モードで禁止します。詳細の説明は
http://tocos-wireless.com/jp/products/TWE-Lite-DIP/TWE-Lite-DIP-step3-interactive.html
設定変更(インタラクティブ)モードを参照します。
o: set Option Bits (0x00000020)を (0x00000022)に変更します。
上の状態でS(保存)を送信すると設定変更完了です。
(7)TWE-Lite R(トワイ・ライター)を接続したまま、無線式アース抵抗レコーダの電源をいれます。
(8)ToCoStick(トコスティック)のリセットボタンは押せないにで、うまく動作しない場合はさし直しが必要となります。
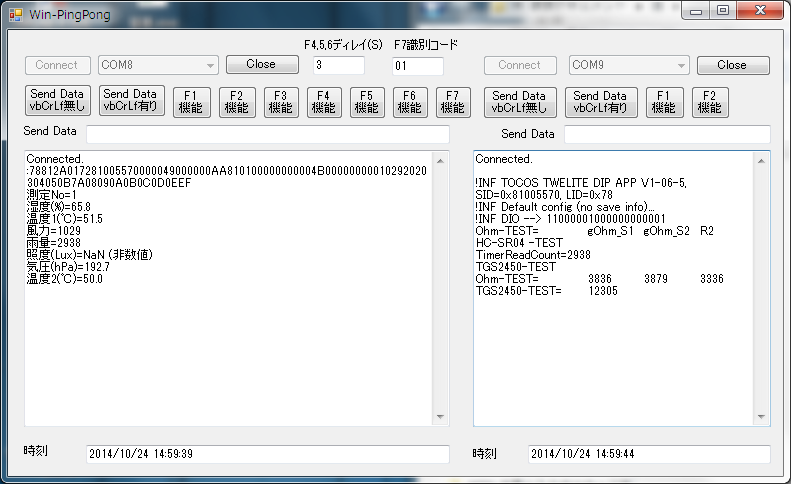
(9)正常動作すると以下の画面になります。
(9)コマンド0x81の状態通知が10分間隔で受信されます。
(10)気象観測レコーダN01とNo2の電波も受信するため以下の画面となります。
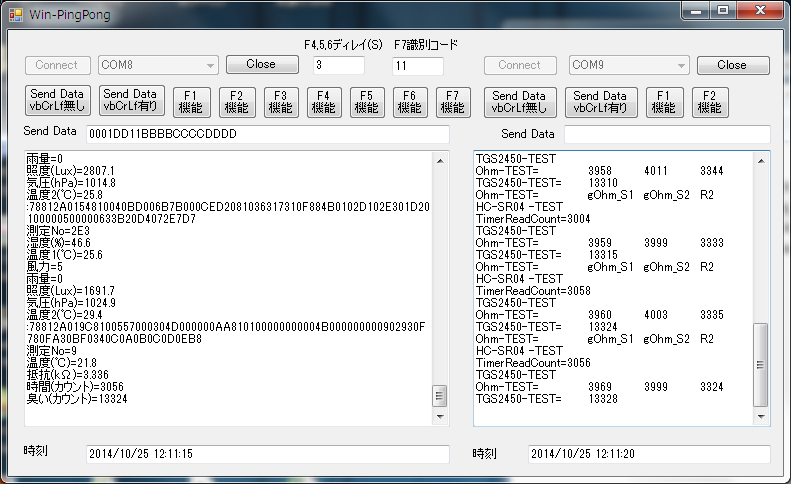
(11)左側が受信データで以下のようになります。
(12)データフォーマットの b: 未使用が"AA"の時、アース抵抗レコーダのデータであると判断して処理を変えます。
(13)気象観測レコーダNo1とNo2とアース抵抗レコーダのデータを受信していることが確認できます。
Connected.
:78812A019C8100557000004D000000AA810100000000004B00000000010295020304050BA608090A0B0C0D0E92
測定No=1
温度(℃)=22.0
抵抗(kΩ)=6.594
時間(カウント)=2982
臭い(カウント)=2057
:78812A013C810035F2004569000CE81D830365193310104B00012A012E01E200EA00000000065221CB3F19DCF8
測定No=12E
湿度(%)=48.2
温度1(℃)=23.4
風力=0
雨量=0
照度(Lux)=3389.7
気圧(hPa)=1020.7
温度2(℃)=23.4
:78812A014B810040BD00516D000CEE1F8103631731105D4B0102D102DC024A00E70000000006356B214071E216
測定No=2DC
湿度(%)=58.6
温度1(℃)=23.1
風力=0
雨量=0
照度(Lux)=1753.9
気圧(hPa)=1026.1
温度2(℃)=26.7
:78812A019C8100557000164D000000AA810100000000004B000000000202990F740F930BC033BA0A0B0C0D0E6A
測定No=2
温度(℃)=22.5
抵抗(kΩ)=3.326
時間(カウント)=3008
臭い(カウント)=13242
:78812A013F810035F2005B69000CE91D8303651833101C4B00012A012F020400DC000000000652C6C93F59DDD9
測定No=12F
湿度(%)=51.6
温度1(℃)=22.0
風力=0
雨量=0
照度(Lux)=3389.7
気圧(hPa)=1020.6
温度2(℃)=24.0
:78812A0154810040BD00676F000CED1F8103631731101C4B0102D102DD022600EF000000000631B01C407AE10E
測定No=2DD
湿度(%)=55.0
温度1(℃)=23.9
風力=0
雨量=0
照度(Lux)=1633.1
気圧(hPa)=1025.8
温度2(℃)=26.2
:78812A019C81005570002C4D000000AA810100000000004B000000000302990F740F930BEC33E10A0B0C0D0E00
測定No=3
温度(℃)=22.5
抵抗(kΩ)=3.326
時間(カウント)=3052
臭い(カウント)=13281
:78812A013F810035F2007169000CE81E83036518330FDC4B00012A013001F300E00000000006521FBE3FB7DD65
測定No=130
湿度(%)=49.9
温度1(℃)=22.4
風力=0
雨量=0
照度(Lux)=3389.7
気圧(hPa)=1019.9
温度2(℃)=24.2
:78812A019C8100557000424D000000AA810100000000004B000000000402940F770FA00BF133EB0A0B0C0D0ECF
測定No=4
温度(℃)=21.9
抵抗(kΩ)=3.334
時間(カウント)=3057
臭い(カウント)=13291
:78812A013F810035F2000769000CE81E83036518330FDC4B00012A013101E800DF00000000065190B83F34DEF2
測定No=131
湿度(%)=48.8
温度1(℃)=22.3
風力=0
雨量=0
照度(Lux)=3294.4
気圧(hPa)=1019.5
温度2(℃)=24.5
:78812A014E810040BD001373000CED208103631731101C4B0102D102DF023100E60000000006335A134071E2C4
測定No=2DF
湿度(%)=56.1
温度1(℃)=23.0
風力=0
雨量=0
照度(Lux)=1691.7
気圧(hPa)=1025.2
温度2(℃)=26.7
:78812A019C8100557000584D000000AA810100000000004B000000000502980F790FAA0BF033F40A0B0C0D0EA0
測定No=5
温度(℃)=22.4
抵抗(kΩ)=3.341
時間(カウント)=3056
臭い(カウント)=13300
:78812A013F810035F2001D69000CE71F83036518330F984B00012A013201E700E500000000065207B73F74E061
測定No=132
湿度(%)=48.7
温度1(℃)=22.9
風力=0
雨量=0
照度(Lux)=3389.7
気圧(hPa)=1019.4
温度2(℃)=25.7
:78812A0154810040BD002975000CED20810363173110194B0102D102E0021600EE0000000006351F16403EE323
測定No=2E0
湿度(%)=53.4
温度1(℃)=23.8
風力=0
雨量=0
照度(Lux)=1753.9
気圧(hPa)=1025.4
温度2(℃)=27.2
:78812A019C81005570006E4D000000AA810100000000004B000000000602980F770FA90BF133F80A0B0C0D0E87
測定No=6
温度(℃)=22.4
抵抗(kΩ)=3.342
時間(カウント)=3057
臭い(カウント)=13304
:78812A013F810035F2003369000CE71F83036518330F984B00012A013301E700EA000000000652B1B13FBBDF5B
測定No=133
湿度(%)=48.7
温度1(℃)=23.4
風力=0
雨量=0
照度(Lux)=3389.7
気圧(hPa)=1019.1
温度2(℃)=25.3
:78812A0154810040BD003F77000CED2081036317310FD94B0102D102E1024D00E5000000000635F41340ABE6DB
測定No=2E1
湿度(%)=58.9
温度1(℃)=22.9
風力=0
雨量=0
照度(Lux)=1753.9
気圧(hPa)=1025.2
温度2(℃)=29.0
:78812A019C8100557000044D000000AA810100000000004B000000000702980F760FAB0BBC33FE0A0B0C0D0E1E
測定No=7
温度(℃)=22.4
抵抗(kΩ)=3.344
時間(カウント)=3004
臭い(カウント)=13310
:78812A013C810035F2004969000CE71F83036518330F984B00012A013401E900EA00000000065206B13F12E197
測定No=134
湿度(%)=48.9
温度1(℃)=23.4
風力=0
雨量=0
照度(Lux)=3389.7
気圧(hPa)=1019.1
温度2(℃)=26.0
:78812A0154810040BD005579000CED2081036317310FD54B0102D102E201FC00FA0000000006357513400DE71F
測定No=2E2
湿度(%)=50.8
温度1(℃)=25.0
風力=0
雨量=0
照度(Lux)=1753.9
気圧(hPa)=1025.2
温度2(℃)=29.2
:78812A019C81005570001A4D000000AA810100000000004B000000000802950F770F9F0BF234030A0B0C0D0ED9
測定No=8
温度(℃)=22.0
抵抗(kΩ)=3.333
時間(カウント)=3058
臭い(カウント)=13315
:78812A0142810035F2005F69000CE71F83036418330F8A4B00012A013501C000F000000000064B146D3FC8E034
測定No=135
湿度(%)=44.8
温度1(℃)=24.0
風力=0
雨量=0
照度(Lux)=2807.1
気圧(hPa)=1014.8
温度2(℃)=25.8
:78812A0154810040BD006B7B000CED2081036317310F884B0102D102E301D20100000500000633B20D4072E7D7
測定No=2E3
湿度(%)=46.6
温度1(℃)=25.6
風力=5
雨量=0
照度(Lux)=1691.7
気圧(hPa)=1024.9
温度2(℃)=29.4
:78812A019C8100557000304D000000AA810100000000004B000000000902930F780FA30BF0340C0A0B0C0D0EB8
測定No=9
温度(℃)=21.8
抵抗(kΩ)=3.336
時間(カウント)=3056
臭い(カウント)=13324
:78812A015A810040BD00177F000CED21810363173110084B0102D102E501BE010A000100000630190340FBE4CB
測定No=2E5
湿度(%)=44.6
温度1(℃)=26.6
風力=1
雨量=0
照度(Lux)=1605.1
気圧(hPa)=1024.2
温度2(℃)=28.1
:78812A019F81005570005C4D000000AA810100000000004B000000000B02910F750FA50BF034160A0B0C0D0E80
測定No=B
温度(℃)=21.5
抵抗(kΩ)=3.340
時間(カウント)=3056
臭い(カウント)=13334
(14)右側がデバッグ用で以下のようになります。
(15)以下のデータからは(1)温度測定、(2)アース抵抗(3)音速(4)臭いの順に測定を開始していますが完了は(1)温度測定、(2)音速(3)アース抵抗(4)臭いの順になっていることが理解できます。(タイマー処理のため、開始順と終了順は一致しません。)
Connected.
!INF TOCOS TWELITE DIP APP V1-06-5, SID=0x81005570, LID=0x78
!INF Default config (no save info)...
!INF DIO --> 11000001000000000001
Ohm-TEST= gOhm_S1 gOhm_S2 R2
HC-SR04 -TEST
TimerReadCount=2982
TGS2450-TEST
Ohm-TEST= 3956 3987 3325
TGS2450-TEST= 13242
Ohm-TEST= gOhm_S1 gOhm_S2 R2
HC-SR04 -TEST
TimerReadCount=3008
TGS2450-TEST
Ohm-TEST= 3956 3987 3325
TGS2450-TEST= 13281
Ohm-TEST= gOhm_S1 gOhm_S2 R2
HC-SR04 -TEST
TimerReadCount=3052
TGS2450-TEST
Ohm-TEST= 3959 4000 3334
TGS2450-TEST= 13291
Ohm-TEST= gOhm_S1 gOhm_S2 R2
HC-SR04 -TEST
TimerReadCount=3057
TGS2450-TEST
Ohm-TEST= 3961 4010 3340
TGS2450-TEST= 13300
Ohm-TEST= gOhm_S1 gOhm_S2 R2
HC-SR04 -TEST
TimerReadCount=3056
TGS2450-TEST
Ohm-TEST= 3959 4009 3341
TGS2450-TEST= 13304
Ohm-TEST= gOhm_S1 gOhm_S2 R2
HC-SR04 -TEST
TimerReadCount=3057
TGS2450-TEST
Ohm-TEST= 3958 4011 3344
TGS2450-TEST= 13310
Ohm-TEST= gOhm_S1 gOhm_S2 R2
HC-SR04 -TEST
TimerReadCount=3004
TGS2450-TEST
Ohm-TEST= 3959 3999 3333
TGS2450-TEST= 13315
Ohm-TEST= gOhm_S1 gOhm_S2 R2
HC-SR04 -TEST
TimerReadCount=3058
TGS2450-TEST
Ohm-TEST= 3960 4003 3335
TGS2450-TEST= 13324
Ohm-TEST= gOhm_S1 gOhm_S2 R2
HC-SR04 -TEST
TimerReadCount=3056
TGS2450-TEST
Ohm-TEST= 3969 3999 3324
TGS2450-TEST= 13328
Ohm-TEST= gOhm_S1 gOhm_S2 R2
HC-SR04 -TEST
TimerReadCount=3056
TGS2450-TEST
Ohm-TEST= 3961 4011 3341
TGS2450-TEST= 13336
(16)記録データの収集は以下の手順で行います。
(17)F7識別コードに「11」を入力します。
(18)「F7機能」ボタンを押すと記録データの収集を開始して以下の画面となります。
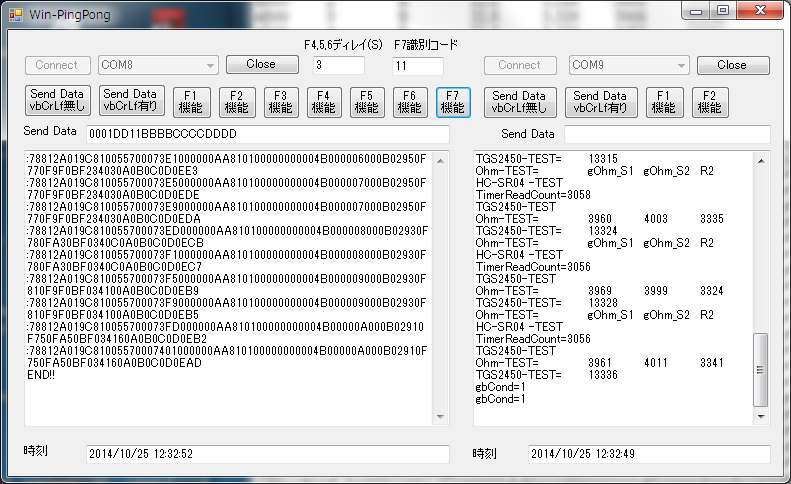
(19)(NoOld)から(NoNew-2)までの測定データを受信して、タブ区切りテキストファイルとして保存します。
*実行後は(NoOld)=(NoNew-1)が設定されます。
*データ収集の基本操作となります。(異常がなければ、この操作だけでデータ収集ができます。)
(20)収集データ例
以下に「F7機能」ボタン実行後に保存されたファイル内容を示します。
*NoOld(16進)が0は電源投入直後で無視する必要があります。
*NoOld(16進)が1は、抵抗(kΩ)と臭い(カウント)の測定完了が記録時に間に合わないため、異常値となります。
*NoOld(16進)が2以降のデータを使用します。
周期(16進) NoOld(16進) NoNew(16進) 温度(℃) 抵抗(kΩ) 時間(カウント) 臭い(カウント) 4B00 0 B 22.0 6.594 2982 2057 4B00 1 B 22.0 6.594 2982 2057 4B00 2 B 22.5 3.326 3008 13242 4B00 3 B 22.5 3.326 3008 13242 4B00 4 B 22.5 3.326 3052 13281 4B00 5 B 22.5 3.326 3052 13281 4B00 6 B 21.9 3.334 3057 13291 4B00 7 B 21.9 3.334 3057 13291 4B00 8 B 22.4 3.341 3056 13300 4B00 9 B 22.4 3.341 3056 13300 :78812A019C8100557000732D000000AA810100000000004B000000000B0295020304050BA608090A0B0C0D0E35 :78812A019F81005570007331000000AA810100000000004B000000000B0295020304050BA608090A0B0C0D0E2E :78812A019F81005570007335000000AA810100000000004B000001000B02990F740F930BC033BA0A0B0C0D0E18 :78812A019C81005570007339000000AA810100000000004B000001000B02990F740F930BC033BA0A0B0C0D0E17 :78812A019C8100557000733D000000AA810100000000004B000002000B02990F740F930BEC33E10A0B0C0D0EBF :78812A019C81005570007341000000AA810100000000004B000002000B02990F740F930BEC33E10A0B0C0D0EBB :78812A019C81005570007345000000AA810100000000004B000003000B02940F770FA00BF133EB0A0B0C0D0E9C :78812A019C81005570007349000000AA810100000000004B000003000B02940F770FA00BF133EB0A0B0C0D0E98 :78812A019C8100557000734D000000AA810100000000004B000004000B02980F790FAA0BF033F40A0B0C0D0E7B :78812A019C81005570007351000000AA810100000000004B000004000B02980F790FAA0BF033F40A0B0C0D0E77 :78812A019C81005570007355000000AA810100000000004B000005000B02980F770FA90BF133F80A0B0C0D0E70 :78812A019C81005570007359000000AA810100000000004B000005000B02980F770FA90BF133F80A0B0C0D0E6C :78812A019C8100557000735D000000AA810100000000004B000006000B02980F760FAB0BBC33FE0A0B0C0D0E95 :78812A019C81005570007361000000AA810100000000004B000006000B02980F760FAB0BBC33FE0A0B0C0D0E91 :78812A019C81005570007365000000AA810100000000004B000007000B02950F770F9F0BF234030A0B0C0D0E5E :78812A019C81005570007369000000AA810100000000004B000007000B02950F770F9F0BF234030A0B0C0D0E5A :78812A019C810055700073E1000000AA810100000000004B000006000B02950F770F9F0BF234030A0B0C0D0EE3 :78812A019C810055700073E5000000AA810100000000004B000007000B02950F770F9F0BF234030A0B0C0D0EDE :78812A019C810055700073E9000000AA810100000000004B000007000B02950F770F9F0BF234030A0B0C0D0EDA :78812A019C810055700073ED000000AA810100000000004B000008000B02930F780FA30BF0340C0A0B0C0D0ECB :78812A019C810055700073F1000000AA810100000000004B000008000B02930F780FA30BF0340C0A0B0C0D0EC7 :78812A019C810055700073F5000000AA810100000000004B000009000B02930F810F9F0BF034100A0B0C0D0EB9 :78812A019C810055700073F9000000AA810100000000004B000009000B02930F810F9F0BF034100A0B0C0D0EB5 :78812A019C810055700073FD000000AA810100000000004B00000A000B02910F750FA50BF034160A0B0C0D0EB2 :78812A019C81005570007401000000AA810100000000004B00000A000B02910F750FA50BF034160A0B0C0D0EAD
「F3機能」ボタンによる特殊操作(1)Send Datacテキストボックスにコマンドを入力し、「F3機能」ボタンを押すとコマンドが実行されます。
(2)測定サイクル時間の変更
*「0001AA114B00CCCCDDDD」→サイクル時間を10分に設定します。
*トータル文字数は変更できません。
*0001→特に意味はありません。
*AA→測定サイクル時間の変更と判定します。
*11→アース抵抗レコーダと判定します。
*4B00→16進数で1/32s刻みの整数です。(設定時間)となります。
*CCCCDDDD→特に意味はありません。
(3)読出し開始データNo変更
*「0001CC110001CCCCDDDD」→レコーダ_No1の読出し開始データNo(=NoOld)を0001に設定します。
*トータル文字数は変更できません。
*0001→特に意味はありません。
*CC→読出し開始データNo変更と判定します。
*11→アース抵抗レコーダと判定します。
*0001→読出し開始データNo(=NoOld)を0001に設定します。
*CCCCDDDD→特に意味はありません
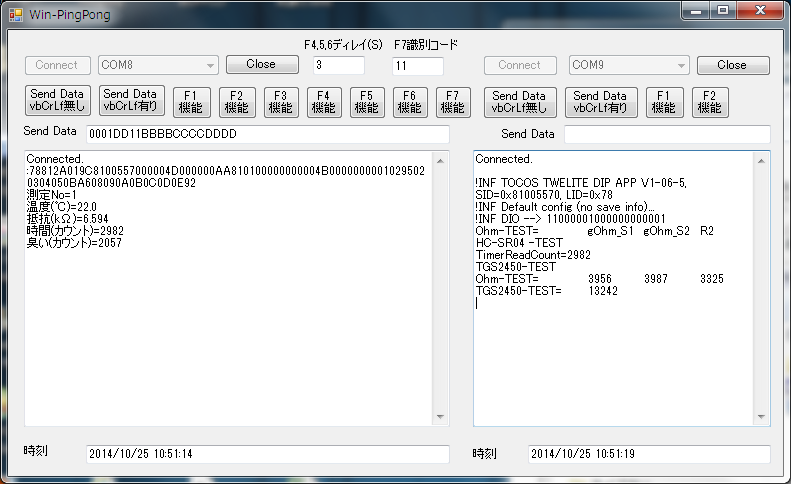
(4)カウンタリセット
*「0001DD11BBBBCCCCDDDD」→レコーダ_No1のカウンタリセット(リセット時と同条件)
*トータル文字数は変更できません。
*0001→特に意味はありません。
*DD→カウンタリセットと判定します。
*11→アース抵抗レコーダと判定します。
*BBBBCCCCDDDD→特に意味はありません
(5)測定No(=NoNew)の変更
*「0001EE11000ACCCCDDDD」→レコーダ_No1の測定データNo(=NoNew)を000Aに設定します。
*トータル文字数は変更できません。
*0001→特に意味はありません。
*EE→測定No(=NoNew)の変更と判定します。
*11→アース抵抗レコーダと判定します。
*000A→測定No(=NoNew)を000Aに設定します。
*CCCCDDDD→特に意味はありません
*この機能は停電トラブル等の非常用で通常使用しません。
(6)カウンタを遅延
*「0001FA11BBBBCCCCDDDD」→レコーダ_No1のカウンタを測定終了後に設定して、測定開始を遅延します。
*トータル文字数は変更できません。
*0001→特に意味はありません。
*FA→カウンタを遅延と判定します。
*11→アース抵抗レコーダと判定します。
*BBBBCCCCDDDD→特に意味はありません
*この機能は測定開始タイミング調整に使用します。
(7)カウンタを進める
*「0001FB11BBBBCCCCDDDD」→レコーダ_No1のカウンタを測定直前に設定して、測定開始を早めます。
*トータル文字数は変更できません。
*0001→特に意味はありません。
*FB→カウンタを進めると判定します。
*11→アース抵抗レコーダと判定します。
*BBBBCCCCDDDD→特に意味はありません
*この機能は測定開始タイミング調整に使用します。
以上の機能を使用すると、測定タイミングの調整や測定データの受信調整が容易にできます。(コマンド入力はコピー・ペーストを使用します。)
App_TweLiteプログラムの変更箇所(1)App_TweLiteプログラムの変更のポイント
*ToCoStick(トコスティック)のプログラムは気象観測レコーダとアース抵抗レコーダ共通としました。
*ToCoStick(トコスティック)のプログラムがApp_TweLiteで、ZigBeeワイヤレスモジュール TWE-LiteのプログラムがSamp_PingPongとした場合のプログラム修正方法がわかりませんでした。
*App_TweLiteはAD変換機能が実装済みであるが、標準のAD変換機能は割込み制御を使用しているため、アース抵抗測定、臭い測定のようにタイミングが重要な測定では、信頼性のある結果がえられませんでした。
*App_TweLiteの標準AD変換機能を有効にしたまま、待ちループ方式のAD変換を行うとエラーが発生しました。
*このためApp_TweLiteのAD変換割込みを禁止しました。
*アース抵抗測定、臭い測定は測定に時間がかかるため、タイマー制御による並列処理としましたが、出力のタイミングズレが発生します。
(2)AD変換割込みの禁止
adc.cファイルで以下の修正をしました。
void vADC_Init(tsObjData_ADC *pData, tsSnsObj *pSnsObj, bool_t bInitAPR) vAHI_ApConfigure(E_AHI_AP_REGULATOR_ENABLE, E_AHI_AP_INT_DISABLE,//***変更2で割込み禁止 //E_AHI_AP_INT_ENABLE, E_AHI_AP_SAMPLE_2, E_AHI_AP_CLOCKDIV_500KHZ, E_AHI_AP_INTREF); (3)AD変換レンジ設定の変更 adc.cファイルで以下の修正をしました。 u8rng = E_AHI_AP_INPUT_RANGE_2;//***変更2で追加 (4)EEPROMと全体シーケンス変更(//***変更1) //***変更1 int gbCond=0; uint16 EPROM_A=0x0000; uint8 gMyData[256]; int W_24FC256(uint16 EPROM_A,uint8 *(pu8Dest),int Ns,int Nd); int R_24FC256(uint16 EPROM_A,uint8 *(pu8Dest),int Ns,int Nd); bool_t MyBusWait(void); void START_WRITE_ACK(void); void WRITE_ACK(void); void STOP_WRITE_ACK(void); void STOP_READ_NACK(void); void STOP_READ_ACK(void); void READ_ACK(void); void START_READ_ACK(void); void STOP_WRITE_NACK(void); uint16 gMySTime=19200;//19200;//320 uint16 gCTnew=0;//書込みデータNo uint16 gCTold=0;//読出しデータNo uint16 gNc=0x03FF;//サイクル記録データ数マスク(4*16*16=1024) int gCRst_F=0;//カウンタリセットフラグ uint8 gPC=0;//パケットカウンタ int gPkt01;//読出しデータNo補正 int CondF =0;
// ボタンに変化あり
if (!bCond && sAppData.sIOData_now.u32BtmChanged) {
//bCond = TRUE;//***変更1
}
// ADC に変化あり
if (!bCond && !IS_APPCONF_OPT_NO_ADC_BASED_TRANSMIT() && sAppData.bUpdatedAdc) {
//bCond = TRUE;//***変更1
}
// ON PRESS TRANSMIT
if (!bCond && IS_APPCONF_OPT_ON_PRESS_TRANSMIT()) {
// どれかボタンが押されているときは送信を続ける
if (sAppData.sIOData_now.u32BtmBitmap && sAppData.sIOData_now.u32BtmBitmap != 0xFFFFFFFF) {
//bCond = TRUE;//***変更1
if ((!sAppData.sIOData_now.u32BtmBitmap) && (u32TickCount_ms - u32TxLastDiClear < ON_PRESS_TRANSMIT_KEEP_TX_ms)) {
// ボタンが離されてから 1000ms 未満
//bCond = TRUE;//***変更1
}
}
if (!bCond
&& sAppData.u8Mode == E_IO_MODE_CHILD_CONT_TX
&& ((sAppData.u32CtTimer0 & sAppData.u8FpsBitMask) == sAppData.u8FpsBitMask)) {
// 打って打って打ちまくれ!のモード
//bCond = TRUE;//***変更1
//bRegular = TRUE;//***変更1
}
// レギュラー送信 // TODO レギュラー送信しないオプション
//if (!bCond && (sAppData.u16CtRndCt == 0))
//***変更1
if (sAppData.u16CtRndCt == 0 || sAppData.u16CtRndCt > gMySTime)
{
sAppData.u16CtRndCt = gMySTime;
if (!IS_APPCONF_OPT_REGULAR_PACKET_NO_TRANSMIT() && gbCond == 0)
{
bCond = TRUE;
bRegular = TRUE;
}
}
// ADC値を処理する。
//***変更1
//bool_t bUpdated = bUpdateAdcValues();
bool_t bUpdated;
bUpdated = bUpdateAdcValues();
if ((sAppData.u8IOFixState & 2) == 0) {
sAppData.bUpdatedAdc = 0;
// 確定情報
sAppData.u8IOFixState |= 0x2;
} else {
if (!IS_APPCONF_OPT_NO_ADC_BASED_TRANSMIT()) {
//sAppData.bUpdatedAdc |= bUpdated;//***変更1
}
}
//***変更1 以下にデータを追加
S_BE_WORD(gMySTime); // 測定周期
S_BE_WORD(gCTold-gPkt01); // データNo
S_BE_WORD(gCTnew); // データNo
for(i=0;i< 15;i++){S_OCTET(gMyData[i]);}//測定データ
//***変更1 以下にコマンド条件を記載
if(PWMDuty[0] > 0xAA00){vPortSetLo(PORT_OUT1);}//OFF設定
if(PWMDuty[0]==0xAA11)
{
vfPrintf(&sSerStream, "gMySTime%4X\r\n",gMySTime);
gMySTime=PWMDuty[1];//サイクル時間変更
vfPrintf(&sSerStream, "gMySTime%4X\r\n",gMySTime);
gbCond=0;
}
if(PWMDuty[0]==0xBB11)
{
gbCond=1;//データ送信開始
vfPrintf(&sSerStream, "gbCond=1\r\n");
}
if(PWMDuty[0]==0xCC11)
{
vfPrintf(&sSerStream, "gCTold%4X\r\n",gCTold);
gCTold=PWMDuty[1];//読出しデータNo
vfPrintf(&sSerStream, "gCTold%4X\r\n",gCTold);
gbCond=0;
}
if(PWMDuty[0]==0xDD11)
{
vfPrintf(&sSerStream, "gCTnew=0;gCTold=0;\r\n");
gCTnew=0;
gCTold=0;
sAppData.u16CtRndCt=gMySTime;
gbCond=0;
}
if(PWMDuty[0]==0xEE11)
{
vfPrintf(&sSerStream, "gCTnew%4X\r\n",gCTnew);
gCTnew=PWMDuty[1];//測定データNo
vfPrintf(&sSerStream, "gCTnew%4X\r\n",gCTnew);
gbCond=0;
}
if(PWMDuty[0]==0xFA11)
{
vfPrintf(&sSerStream, "gCTold%4X\r\n",sAppData.u16CtRndCt);
sAppData.u16CtRndCt=gMySTime;//時間カウンタを遅延
vfPrintf(&sSerStream, "gCTold%4X\r\n",sAppData.u16CtRndCt);
gbCond=0;
}
if(PWMDuty[0]==0xFB11)
{
vfPrintf(&sSerStream, "gCTold%4X\r\n",sAppData.u16CtRndCt);
sAppData.u16CtRndCt=6;//時間カウンタを進める
vfPrintf(&sSerStream, "gCTold%4X\r\n",sAppData.u16CtRndCt);
gbCond=0;
}
//***変更1
int W_24FC256(uint16 EPROM_A,uint8 *(pu8Dest),int Ns,int Nd)
{
int i;
uint8 AH =(uint8) (EPROM_A /256) & 0xFF;
uint8 AL = (uint8) EPROM_A & 0xFF;
vPortSetLo(PORT_OUT1);//OFF設定
vAHI_InterruptSetPriority(0xFFFF,0);//全割り込みを禁止
vAHI_SiMasterWriteSlaveAddr(0x50, FALSE);
START_WRITE_ACK();
while(bAHI_SiMasterPollTransferInProgress()); /* busy wait */
vAHI_SiMasterWriteData8(AH);
WRITE_ACK();
while(bAHI_SiMasterPollTransferInProgress()); /* busy wait */
vAHI_SiMasterWriteData8(AL);
WRITE_ACK();
while(bAHI_SiMasterPollTransferInProgress());/* busy wait */
for(i=0;i< Nd;i++)
{
vAHI_SiMasterWriteData8(pu8Dest[Ns+i]);
WRITE_ACK();
while(bAHI_SiMasterPollTransferInProgress()); /* busy wait */
}
STOP_WRITE_NACK();
while(bAHI_SiMasterPollTransferInProgress()); /* busy wait */
vAHI_InterruptSetPriority(0xFFFF,8);//全割り込みをレベル8で解除
return 0;
}
//***変更1
int R_24FC256(uint16 EPROM_A,uint8 *(pu8Dest),int Ns,int Nd)
{
int i;
uint8 AH =(uint8) (EPROM_A /256) & 0xFF;
uint8 AL = (uint8) EPROM_A & 0xFF;
vPortSetLo(PORT_OUT1);//OFF設定
vAHI_InterruptSetPriority(0xFFFF,0);//全割り込みを禁止
vAHI_SiMasterWriteSlaveAddr(0x50, FALSE);
START_WRITE_ACK();
while(bAHI_SiMasterPollTransferInProgress()); /* busy wait */
vAHI_SiMasterWriteData8(AH);
WRITE_ACK();
if(!MyBusWait()){return 1;}
vAHI_SiMasterWriteData8(AL);
WRITE_ACK();
if(!MyBusWait()){return 1;}
vAHI_SiMasterWriteSlaveAddr(0x50, TRUE);
START_WRITE_ACK();
if(!MyBusWait()){return 1;}
for(i=0;i<Nd;i++)
{
READ_ACK();
if(!MyBusWait()){return 1;}
pu8Dest[Ns+i]=u8AHI_SiMasterReadData8();
}
STOP_READ_NACK();
while(bAHI_SiMasterPollTransferInProgress()); /* busy wait */
vAHI_InterruptSetPriority(0xFFFF,8);//全割り込みをレベル8で解除
return 0;
}
//***変更1
void START_WRITE_ACK(void)
{
vAHI_SiMasterSetCmdReg(E_AHI_SI_START_BIT,
E_AHI_SI_NO_STOP_BIT,
E_AHI_SI_NO_SLAVE_READ,
E_AHI_SI_SLAVE_WRITE,
E_AHI_SI_SEND_ACK,
E_AHI_SI_NO_IRQ_ACK);
}
void START_READ_ACK(void)
{
vAHI_SiMasterSetCmdReg(E_AHI_SI_START_BIT,
E_AHI_SI_NO_STOP_BIT,
E_AHI_SI_SLAVE_READ,
E_AHI_SI_NO_SLAVE_WRITE,
E_AHI_SI_SEND_ACK,
E_AHI_SI_NO_IRQ_ACK);
}
void WRITE_ACK(void)
{
vAHI_SiMasterSetCmdReg(E_AHI_SI_NO_START_BIT,
E_AHI_SI_NO_STOP_BIT,
E_AHI_SI_NO_SLAVE_READ,
E_AHI_SI_SLAVE_WRITE,
E_AHI_SI_SEND_ACK,
E_AHI_SI_NO_IRQ_ACK);
}
void STOP_WRITE_ACK(void)
{
vAHI_SiMasterSetCmdReg(E_AHI_SI_NO_START_BIT,
E_AHI_SI_STOP_BIT,
E_AHI_SI_NO_SLAVE_READ,
E_AHI_SI_SLAVE_WRITE,
E_AHI_SI_SEND_ACK,
E_AHI_SI_NO_IRQ_ACK);
}
void STOP_WRITE_NACK(void)
{
vAHI_SiMasterSetCmdReg(E_AHI_SI_NO_START_BIT,
E_AHI_SI_STOP_BIT,
E_AHI_SI_NO_SLAVE_READ,
E_AHI_SI_SLAVE_WRITE,
E_AHI_SI_SEND_NACK,
E_AHI_SI_NO_IRQ_ACK);
}
void STOP_READ_NACK(void)
{
vAHI_SiMasterSetCmdReg(E_AHI_SI_NO_START_BIT,
E_AHI_SI_STOP_BIT,
E_AHI_SI_SLAVE_READ,
E_AHI_SI_NO_SLAVE_WRITE,
E_AHI_SI_SEND_NACK,
E_AHI_SI_NO_IRQ_ACK);
}
void STOP_READ_ACK(void)
{
vAHI_SiMasterSetCmdReg(E_AHI_SI_NO_START_BIT,
E_AHI_SI_STOP_BIT,
E_AHI_SI_SLAVE_READ,
E_AHI_SI_NO_SLAVE_WRITE,
E_AHI_SI_SEND_ACK,
E_AHI_SI_NO_IRQ_ACK);
}
void READ_ACK(void)
{
vAHI_SiMasterSetCmdReg(E_AHI_SI_NO_START_BIT,
E_AHI_SI_NO_STOP_BIT,
E_AHI_SI_SLAVE_READ,
E_AHI_SI_NO_SLAVE_WRITE,
E_AHI_SI_SEND_ACK,
E_AHI_SI_NO_IRQ_ACK);
}
bool_t MyBusWait(void)
{
while(bAHI_SiMasterPollTransferInProgress()); /* busy wait */
//vfPrintf(&sSerStream, "%d %d ", bAHI_SiMasterPollArbitrationLost(),bAHI_SiMasterCheckRxNack());
if (bAHI_SiMasterPollArbitrationLost() | bAHI_SiMasterCheckRxNack()) {
/* release bus & abort */
vAHI_SiMasterSetCmdReg(E_AHI_SI_NO_START_BIT,
E_AHI_SI_STOP_BIT,
E_AHI_SI_NO_SLAVE_READ,
E_AHI_SI_SLAVE_WRITE,
E_AHI_SI_SEND_ACK,
E_AHI_SI_NO_IRQ_ACK);
return(FALSE);
}
return(TRUE);
}
(5)温度測定
if(sAppData.u16CtRndCt == 8 )
{
//****変更2温度測定
vAHI_AdcEnable(E_AHI_ADC_SINGLE_SHOT,E_AHI_AP_INPUT_RANGE_1,E_AHI_ADC_SRC_ADC_1);
vAHI_AdcStartSample();//測定開始
while(bAHI_AdcPoll());//AD変換待ち
uint16 ADC=u16AHI_AdcRead();//結果読み込み
gMyData[0]=ADC >> 8;
gMyData[1]=ADC;
}
(6)アース抵抗測定
//***変更3アース抵抗
void fOhm(void);
uint8 gOhm_F=0;//抵抗測定フラグ
uint16 gOhm_C=0;//TickTimerカウンタ
uint16 gOhm_N=5;//総和回数
uint16 gOhm_NC=0;//総和カウンタ
uint32 gOhm_S1;//ADC総和1
uint32 gOhm_S2;//ADC総和
if(sAppData.u16CtRndCt == 7 )
{
//変更3
vfPrintf(&sSerStream,"Ohm-TEST=\tgOhm_S1\tgOhm_S2\tR2\r\n");//TEST表示
gOhm_F=1;//フラグON
}
//***変更3アース抵抗
int i;
for(i = 0;i < 16;i++){gMyData[i]=i;}
vPortSetLo(PORT_OUT3);//OFF設定
vPortSetLo(PORT_OUT4);//OFF設定
case E_AHI_DEVICE_TICK_TIMER: //比較的頻繁な処理
//***変更3 アース抵抗
if(gOhm_F == 1)
{
fOhm();//***変更3 アース抵抗
}
//***変更3アース抵抗
void fOhm(void)
{
gOhm_C++;
if(gOhm_C == 1)
{
vPortSetLo(PORT_OUT3);//OFF設定
vPortSetHi(PORT_OUT4);//ON設定
}
if(gOhm_C == 20)
{
vAHI_AdcEnable(E_AHI_ADC_SINGLE_SHOT,E_AHI_AP_INPUT_RANGE_2,E_AHI_ADC_SRC_ADC_2);
vAHI_AdcStartSample();//測定開始
while(bAHI_AdcPoll());//AD変換待ち
gOhm_S1=gOhm_S1+ u16AHI_AdcRead();//結果読み込み
//vAHI_AdcDisable();
}
if(gOhm_C == 40)
{
vPortSetHi(PORT_OUT3);//ON設定
vPortSetLo(PORT_OUT4);//OFF設定
}
if(gOhm_C ==60)
{
vAHI_AdcEnable(E_AHI_ADC_SINGLE_SHOT,E_AHI_AP_INPUT_RANGE_2,E_AHI_ADC_SRC_ADC_2);
vAHI_AdcStartSample();//測定開始
while(bAHI_AdcPoll());//AD変換待ち
gOhm_S2=gOhm_S2+ u16AHI_AdcRead();//結果読み込み
//vAHI_AdcDisable();
}
if(gOhm_C > 80)
{
gOhm_C=0;
gOhm_NC++;
//vfPrintf(&sSerStream,"Ohm-TEST=\t%d\t%d\r\n",gOhm_S1,gOhm_S2);//TEST表示
if(gOhm_NC > gOhm_N)
{
gOhm_NC=0;
uint32 R2=3300*gOhm_S2/gOhm_S1;
vfPrintf(&sSerStream,"Ohm-TEST=\t%d\t%d\t%d\r\n",gOhm_S1,gOhm_S2,R2);//TEST表示
gMyData[2]=gOhm_S1 >> 8;
gMyData[3]=gOhm_S1;
gMyData[4]=gOhm_S2 >> 8;
gMyData[5]=gOhm_S2;
gOhm_S1=0;
gOhm_S2=0;
gOhm_F=0;//これを有効にすると1回で終了!!
}
}
}
(7)音速測定
//***変更4 音速
void HC_SR04(void);
if(sAppData.u16CtRndCt == 6 )
{
//変更4
vfPrintf(&sSerStream,"HC-SR04 -TEST\r\n");//TEST表示
HC_SR04();
}
//***変更4 音速
void HC_SR04(void)
{
//vfPrintf(&sSerStream,"HC-SR04-TEST\r\n");//TEST表示
vPortAsInput(PORT_INPUT1);//入力設定
vPortAsOutput(PORT_INPUT2);//出力設定
vPortSetLo(PORT_INPUT2);//トリガOFF
vAHI_TimerEnable(E_AHI_TIMER_4,3,FALSE,FALSE,FALSE);//プレスケール1/8設定
vAHI_TimerStartSingleShot(E_AHI_TIMER_4,0x0000,0x0000);//タイマー4スタート
while(u16AHI_TimerReadCount(E_AHI_TIMER_4) < 20);//10μsディレイ
vPortSetHi(PORT_INPUT2);//トリガON
vAHI_TimerStop (E_AHI_TIMER_4);//タイマー4ストップ
vAHI_TimerStartRepeat(E_AHI_TIMER_4,0x0000,0x0000);//タイマー4スタート
while(u16AHI_TimerReadCount(E_AHI_TIMER_4) != 20);//10μsディレイ
vPortSetLo(PORT_INPUT2);//トリガOFF
vAHI_TimerStop (E_AHI_TIMER_4);//タイマー4ストップ
vAHI_TimerStartRepeat(E_AHI_TIMER_4,0x0000,0x0000);//タイマー4スタート
while(bPortRead(PORT_INPUT1) && u16AHI_TimerReadCount(E_AHI_TIMER_4) != 0xffff);//エコーON
vAHI_TimerStop (E_AHI_TIMER_4);//タイマー4ストップ
vAHI_TimerStartRepeat(E_AHI_TIMER_4,0x0000,0x0000);//タイマー4スタート
while(!bPortRead(PORT_INPUT1) && u16AHI_TimerReadCount(E_AHI_TIMER_4) != 0xffff);//エコーOFF
uint16 TimerReadCount=u16AHI_TimerReadCount(E_AHI_TIMER_4);
vfPrintf(&sSerStream,"TimerReadCount=%d\r\n",TimerReadCount);//結果出力
vAHI_TimerStop (E_AHI_TIMER_4);//タイマー4ストップ
gMyData[6]=TimerReadCount >> 8;
gMyData[7]=TimerReadCount;
vPortAsInput(PORT_INPUT2);//入力設定
}
(8)臭い測定
//***変更5
void MyDelay(long Tu);
uint16 TTC=0;//TickTimerカウンタ
uint8 gTGS_F=0;//TGS2450フラグ
uint16 gTGS_N=20;//総和回数
uint16 gTGS_NC=0;//総和カウンタ
uint32 gADC;//ADC総和
void TGS2450();
if(sAppData.u16CtRndCt == 5 )
{
//変更5
vfPrintf(&sSerStream,"TGS2450-TEST\r\n");//TEST表示
gTGS_F=1;//フラグON
}
//****変更5
vPortSetLo(PORT_OUT1);//OFF設定
vPortSetLo(PORT_OUT2);//OFF設定
//***変更5
if(gTGS_F == 1)
{
TTC++;
if(TTC > 62)
{
TTC=0;
gTGS_NC++;
TGS2450();
if(gTGS_NC > gTGS_N)
{
gTGS_NC=0;
vfPrintf(&sSerStream,"TGS2450-TEST=\t%d\r\n",gADC);//TEST表示
gMyData[8]=gADC >> 8;
gMyData[9]=gADC;
gADC=0;
gTGS_F=0;//これを有効にすると1回で終了!!
}
}
}
//***変更5 臭い
void MyDelay(long Tu)
{
vAHI_TimerEnable(E_AHI_TIMER_4,4,FALSE,FALSE,FALSE);//プレスケール1/16設定
vAHI_TimerStartSingleShot(E_AHI_TIMER_4,0x0000,0x0000);//タイマー4スタート
while(u16AHI_TimerReadCount(E_AHI_TIMER_4) < Tu);//Tuμsディレイ
vAHI_TimerStop (E_AHI_TIMER_4);//タイマー4ストップ
vAHI_TimerDisable (E_AHI_TIMER_4);//タイマー開放
}
//***変更5 臭い
void TGS2450()
{
vPortSetHi(PORT_OUT1);//ON設定
MyDelay(3000);
vPortSetHi(PORT_OUT2);//ON設定
MyDelay(5000);
vAHI_AdcEnable(E_AHI_ADC_SINGLE_SHOT,E_AHI_AP_INPUT_RANGE_2,E_AHI_ADC_SRC_ADC_2);
vAHI_AdcStartSample();//測定開始
//MyDelay(1000);
while(bAHI_AdcPoll());//AD変換待ち
gADC=gADC + u16AHI_AdcRead();//結果読み込み
//MyDelay(1000);
vPortSetLo(PORT_OUT1);//OFF設定
vPortSetLo(PORT_OUT2);//OFF設定
}
結果の検討(1)アース抵抗測定は家庭菜園の状態監視に役立つような気がします。
(2)音速、臭い測定は活用できるか?は不明です。
(3)アース抵抗測定と臭い測定のApp_TweLiteへの組み込みは思いのほかてこずりました。
(4)AD変換の割込み制御はタイミングが重要な測定に適用すると、測定値の信頼性がないことがわかりました。
(5)これに対して待ちループ制御はタイミングズレが無く測定値の信頼性がありますが、CPUが占有されるため、複数の並列処理に悪影響が生じる。
(6)今回は、AD変換の割込み制御を禁止し、待ちループ制御としました。
(7)無線のパケット通信の基本部分に関しては、理解できませんでした!!
(8)今後回路の万能基板化を行い、適用評価を行う予定です。
(9)実際の観測では、風雨にさらされるため腐食による断線の対策等が必要となります。
 30章:無線式気象観測レコーダの常夜灯機能追加に行く。
30章:無線式気象観測レコーダの常夜灯機能追加に行く。