丂帺桼搙儅僀僋儘僒乕儃 SG90惂屼偵偮偄偰専摙偟傑偡丅
 儅僀僋儘僒乕儃 SG90偺峸擖愭偲壙奿
儅僀僋儘僒乕儃 SG90偺峸擖愭偲壙奿乮侾乯峸擖愭丗傾儅僝儞
乮俀乯昳柤丗儅僀僋儘僒乕儃 SG90 (10屄擖)
乮俁乯壙奿丗亸 2,597乮攝憲偼柍椏乯
儅僀僋儘僒乕儃 SG90偺巇條乮侾乯幙検丗9倗
乮俀乯奜宍丟22.2倶11.8倶31mm
乮俁乯僩儖僋丗1.8kgf丒cm
乮係乯摦嶌懍搙丗0.1丂s/60搙
乮俆乯摦嶌揹埑丗4.8乣5V
乮俇乯巜椷僷儖僗暆偺忦審
*僷儖僗暆1.5ms偺偲偒拞棫埵抲偵岦偐偭偰堏摦
*僷儖僗暆2ms偺偲偒塃夞揮
*僷儖僗暆1ms偺偲偒塃夞揮
*僷儖僗揹埑偼儅僀僐儞巜椷揹埑偱摦嶌偟傑偡丅
*1僷儖僗偱栺10搙嬤偔夞揮偟傑偡丅乮偐側傝戝傑偐側摦偒偱偡乯
*僷儖僗悢傪懡偔偟偰傕丄堦掕埵抲埲忋偵偼夞揮偟傑偣傫丅
丂徻嵶偼10-1.pdf傪嶲徠婅偄傑偡丅
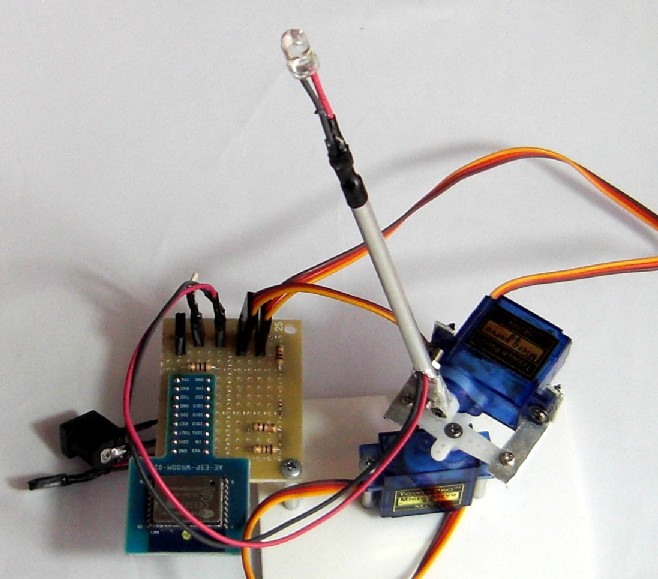
 [31-1.pdf]傪僟僂儞儘乕僪偡傞丅 俀帺桼搙儅僀僋儘僒乕儃 SG90偺奜娤
[31-1.pdf]傪僟僂儞儘乕僪偡傞丅 俀帺桼搙儅僀僋儘僒乕儃 SG90偺奜娤丂 俀帺桼搙儅僀僋儘僒乕儃 SG90偺奜娤傪埲壓偵帵偟傑偡丅
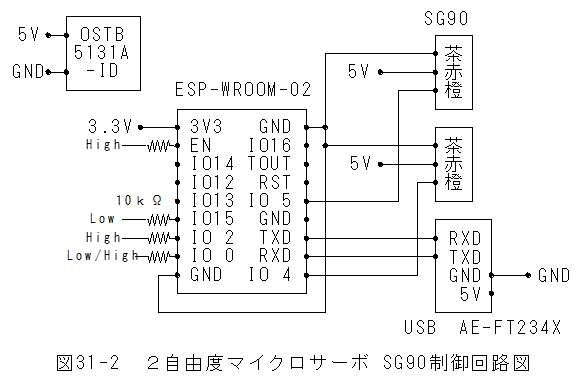
 俀帺桼搙儅僀僋儘僒乕儃 SG90惂屼夞楬恾
俀帺桼搙儅僀僋儘僒乕儃 SG90惂屼夞楬恾丂 俀帺桼搙儅僀僋儘僒乕儃 SG90惂屼夞楬恾傪埲壓偵帵偟傑偡丅
 俤俽俹亅倂俼俷俷俵亅侽俀梡僗働僢僠
俤俽俹亅倂俼俷俷俵亅侽俀梡僗働僢僠丂俤俽俹亅倂俼俷俷俵亅侽俀梡僗働僢僠偼埲壓偲偟傑偟偨丅
//SG90_V1
#include <stdlib.h>
#include <ESP8266WiFi.h>
const char* ssid = "SSID";//柍慄LAN偺SSID傪愝掕偟傑偡丅
const char* password = "password";//柍慄LAN偺password傪愝掕偟傑偡丅
const char* host = "192.168.11.2";//僷僜僐儞偺IP傾僪儗僗傪愝掕偟傑偡丅
const int httpPort = 13000;//TCP僒乕僶偺億乕僩
static String gSendText="";
void WiFi_loop();
void SG90_Servo();
void serialEvent();
int gX_T=0,gX_N=0;
int gY_T=0,gY_N=0;
void setup()
{
Serial.begin(115200);
pinMode(4, OUTPUT);
pinMode(5, OUTPUT);
WiFi.begin(ssid, password);//柍慄LAN偵愙懕梫媮
while (WiFi.status() != WL_CONNECTED)
{
delay(500);
Serial.print(".");
}
Serial.println("");
Serial.println("WiFi connected");
int i;
for(i=0;i<10;i++)
{
digitalWrite(4,HIGH);
digitalWrite(5,HIGH);
delayMicroseconds(1500);
digitalWrite(4,LOW);
digitalWrite(5,LOW);
delay(10);
}
}
void loop()
{
SG90_Servo();
serialEvent();
WiFi_loop();
if(gX_T>8){gX_T=8;}
if(gX_T<-8){gX_T=-8;}
if(gY_T>8){gY_T=8;}
if(gY_T<-8){gY_T=-8;}
}
void SG90_Servo()
{
int i;
if(gX_T-gX_N>0)
{
for(i=0;i<gX_T-gX_N;i++)
{
digitalWrite(4,HIGH);
delay(2);
digitalWrite(4,LOW);
delay(10);
}
gX_N=gX_T;
}
else
{
if(gX_T-gX_N<0)
{
for(i=0;i<gX_N-gX_T;i++)
{
digitalWrite(4,HIGH);
delay(1);
digitalWrite(4,LOW);
delay(11);
}
gX_N=gX_T;
}
}
if(gY_T-gY_N>0)
{
for(i=0;i<gY_T-gY_N;i++)
{
digitalWrite(5,HIGH);
delay(2);
digitalWrite(5,LOW);
delay(10);
}
gY_N=gY_T;
}
else
{
if(gY_T-gY_N<0)
{
for(i=0;i<gY_N-gY_T;i++)
{
digitalWrite(5,HIGH);
delay(1);
digitalWrite(5,LOW);
delay(11);
}
}
gY_N=gY_T;
}
}
void serialEvent()
{
int gi=0;
char inputString[50];
while (Serial.available())
{
String line = Serial.readStringUntil('\n');//庴怣偟傑偡丅
Serial.println(line+"\r\n");
if(line.indexOf("BT") == 0)
{
int Bracket2 = line.indexOf('#', 2 );
int Bracket3 = line.indexOf('#',Bracket2+1);
int Bracket4 = line.indexOf('#',Bracket3+1);
String inString_gX =line.substring(Bracket2+1,Bracket3);
String inString_gY =line.substring(Bracket3+1,Bracket4);
gX_T = inString_gX.toInt();
gY_T = inString_gY.toInt();
Serial.println(gX_T)/10;
Serial.println(gY_T)/10;
}
}
}
void WiFi_loop()
{
WiFiClient client;
if (client.connect(host, httpPort))
{
if(gSendText.length() > 0)
{
client.print(gSendText);//僨乕僞傪憲怣
Serial.print(gSendText);
gSendText="";
delay(500);
}
else
{
client.print("NG\r\n");
Serial.print("NG\r\n");
delay(1000);
}
while(client.available())
{
String line = client.readStringUntil('\n');//庴怣偟傑偡丅
if(line.indexOf("BT") == 0)
{
int Bracket2 = line.indexOf('#', 2 );
int Bracket3 = line.indexOf('#',Bracket2+1);
int Bracket4 = line.indexOf('#',Bracket3+1);
String inString_gX =line.substring(Bracket2+1,Bracket3);
String inString_gY =line.substring(Bracket3+1,Bracket4);
gX_T = inString_gX.toInt()/10;
gY_T = inString_gY.toInt()/10;
Serial.println(gX_T);
Serial.println(gY_T);
}
Serial.print(line+"\r\n");
gSendText=line + "=OK\r\n";//憲怣僨乕僞偺僙僢僩
}
}
}
俤俽俹亅倂俼俷俷俵亅侽僗働僢僠丵僥僉僗僩僼傽僀儖丂俤俽俹亅倂俼俷俷俵亅侽僗働僢僠丵僥僉僗僩僼傽僀儖偼埲壓偐傜嶲徠偱偒傑偡丅
 俤俽俹亅倂俼俷俷俵亅侽僗働僢僠丵僥僉僗僩僼傽僀儖偵偄偔丅僗働僢僠偺彂崬傒
俤俽俹亅倂俼俷俷俵亅侽僗働僢僠丵僥僉僗僩僼傽僀儖偵偄偔丅僗働僢僠偺彂崬傒乮侾乯ESP-WROOM-02偺僼儔僢僔儏彂偒姺偊帪偺僺儞愝掕
*EN僺儞丗乮Chip Enable.乯仺High(10k兌僾儖傾僢僾乯
*GPIO-15僺儞丗乮Type丂I/O丂MTDO丟HSPI_CS; UART0_RTS)仺LowHigh(10k兌僾儖僟僂儞乯
*GPIO-2僺儞丗乮Type丂I/O丂UART Tx during flash programming)仺High(10k兌僾儖傾僢僾乯
*GPIO-0僺儞丗乮Type丂I/O丂SPI_CS2)仺Low(10k兌僾儖僟僂儞乯乮Low偱儔僢僔儏彂偒姺偊儌乕僪乯
*TX僺儞丗倀俽俛僔儕傾儖曄姺儌僕儏乕儖偺RX
*RX僺儞丗倀俽俛僔儕傾儖曄姺儌僕儏乕儖偺TX
*GND僺儞丗倀俽俛僔儕傾儖曄姺儌僕儏乕儖偺GND
乮俀乯ESP-WROOM-02偺揹尮傪搳擖偟傑偡丅
乮俁乯儊僯儏乕乽僣乕儖乿丵乽億乕僩乿丵乽COM14乿傪慖戰偟傑偡丅
乮係乯儊僯儏乕乽僗働僢僠乿丵乽儅僀僐儞儃乕僪偵彂崬傓乿傪慖戰偟傑偡丅
乮俆乯彂崬傒偑姰椆偟傑偡丅
乮俇乯GPIO-0僺儞丗乮Type丂I/O丂SPI_CS2)仺High(10k兌僾儖傾僢僾乯偵栠偟傑偡丅
乮俈乯ESP-WROOM-02偺揹尮傪嵞搳擖偟傑偡丅
processing梡僗働僢僠丂processing梡僗働僢僠偼埲壓偲偟傑偟偨丅
//TCP_Server
import processing.net.*;
int port = 13000;
Server myServer;
Client thisClient;
float Mx,My;
int gM=0;
void setup()
{
size(400,400,P3D);
noStroke();
myServer = new Server(this, port);
}
void draw()
{
//thisClient = myServer.available();
Mx=map(mouseX, 0, width, -PI/2, PI/2);
My=map(mouseY, 0, height, PI/2, -PI/2);
if(abs(Mx)>abs(My))
{
if(abs(Mx)<0.3)
{gM=0;}
else
{
if(abs(Mx)<0.5)
{gM=3;}
else{gM=1;}
}
}
else
{
if(abs(My)<0.3)
{gM=0;}
else
{
if(abs(My)<0.5)
{gM=4;}
else{gM=2;}
}
}
//thisClient = myServer.available();
thisClient = myServer.available();
if (thisClient != null)
{
if (thisClient.available() > 0)
{
//println(thisClient.ip() + " : " + thisClient.readString());
println(thisClient.readString());
int MX=(int)(100*Mx);
int MY=(int)(100*My);
thisClient.write("BT"+gM+"#"+MX+"#"+MY+"#\r\n");
}
}
pushMatrix();
lights();
background(255);
fill(0,255,0);
translate(width / 2, height / 2);
rotateZ(Mx);
rotateX(My);
box(100,20,200);
popMatrix();
}
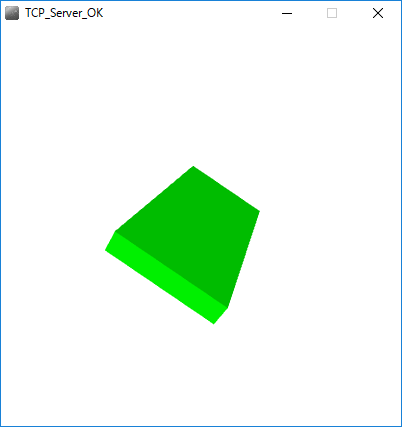
丂processing僗働僢僠丵僥僉僗僩僼傽僀儖偼埲壓偐傜嶲徠偱偒傑偡丅processing僗働僢僠丵僥僉僗僩僼傽僀儖偵偄偔摦嶌帋尡乮侾乯processing梡僗働僢僠傪Run偟傑偡丅
乮俀乯儅僗僗傪摦偐偡偙偲丄楢摦偟偰俀帺桼搙儅僀僋儘僒乕儃 SG偑摦嶌偟傑偡丅
 俀帺桼搙儅僀僋儘僒乕儃 SG90惂屼傑偲傔
俀帺桼搙儅僀僋儘僒乕儃 SG90惂屼傑偲傔乮侾乯 俀帺桼搙儅僀僋儘僒乕儃 SG90惂屼偼斾妑揑偵娙扨偱偟偨丅
乮俀乯processing梡僗働僢僠乽TCP_Server乿偼俀俉復丗WiFi柍慄偲processing偱偍傕偪傖傪摦偐偡偲嫟捠偱偡丅
乮俁乯傑偨丄俁侽復丗崅昳埵俢俠侾俀倁僽儔僔晅儌乕僞PWN10EB12CB偺僒乕儃惂屼偲傕嫟捠偱偡丅