 コパルステッピングモーター SPG27-1702の購入先と価格
コパルステッピングモーター SPG27-1702の購入先と価格(1)購入先:秋月電子通商
(2)品名:コパルステッピングモーター SPG27-1702
(3)価格:¥300
コパルステッピングモーター SPG27-17020の仕様詳細仕様は19-1.pdfを参照願います。
 [19-1.pdf]をダウンロードする。トランジスタアレイ(7chダーリントンシンクドライバ)TD62003APG(2個入)の購入先と価格
[19-1.pdf]をダウンロードする。トランジスタアレイ(7chダーリントンシンクドライバ)TD62003APG(2個入)の購入先と価格(1)購入先:秋月電子通商
(2)品名:トランジスタアレイ(7chダーリントンシンクドライバ)TD62003APG(2個入)
(3)価格:¥100
トランジスタアレイ(7chダーリントンシンクドライバ)TD62003APGの仕様詳細仕様は19-2.pdfを参照願います。
[19-2.pdf]をダウンロードする。ステッピングモーター制御回路図ステッピングモーター制御回路図を以下に示します。
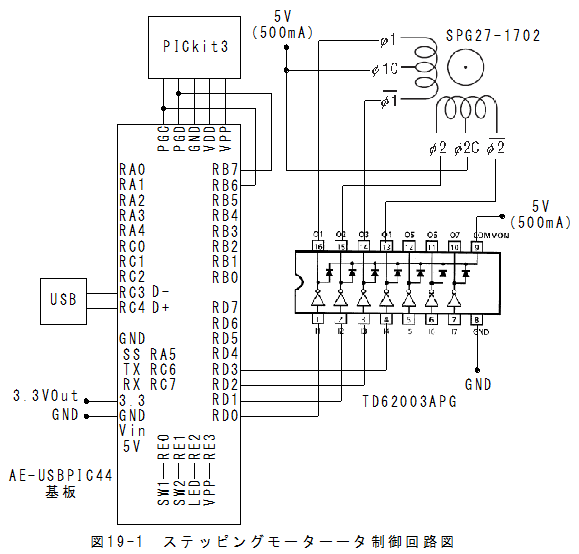
*SPG27-1702の定格供給電圧は12Vですが、5V-500mAの電源でも動作することが確認できました。
*供給電圧→5Vとすると駆動トルクが減少するため、応答周波数も低下します。
*TD62003APGで2個のステッピングモーターを駆動できます。
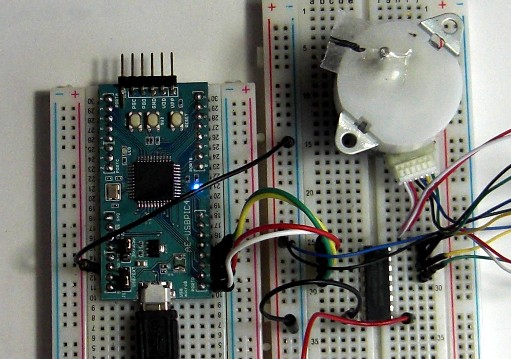
ステッピングモーター制御回路外観ステッピングモーター制御回路外観を以下に示します。
 ステッピングモーター制御回路のプログラムコード
ステッピングモーター制御回路のプログラムコード1章:MPLABR X IDE v2.25開発環境の構築、「newmain18.cの内容変更ファイル」をベースに修正しました。
(1)主要コード
*SW1でカウントアップ、SW2でカウントダウンします。
*カウント値の変化に応じて回転します。
*単純な1相励磁としました。
unsigned short n;
unsigned char CH[4] = { 0x01,0x02,0x04,0x08};
void init(void)
{
ADCON1 = 0b00001111; //全チャンネルがデジタルに設定され、VDDとVSSが選択
TRISA = 0b00011100; //A0~A4を入力に設定
TRISB = 0b00000000; //出力に設
TRISC = 0b00110000; //D-,D+(USB用)RC4とRC5を入力に設定
TRISD = 0b00000000; //D0~D7を出力に設定
TRISE = 0b00000011; //SW1,2=INPUT LED=OUTPUT
LATA = 0b00000000;
LATB = 0b00000000;
LATC = 0b00000000;
LATD = 0b00000000;
LATE = 0b00000000;
}
void main(void)
{
int i;
init();
n = 1000;
while(1)
{
for(i=0;i<10;i++){__delay_ms( 2 );} //20mS
LED = !LED;
if(SW1 == 0)
{
n = n+1;
}
if(SW2 == 0)
{
n = n-1;
}
PORTD=CH[n % 4];
}
}
全体プログラム詳細は19-1.txtファイルを参照願います。
[19-1.txt]をダウンロードする。ステッピングモーターの制御まとめ(1)ステッピングモーターは簡単な制御で、正確な位置決めができるのが特徴です。
(2)マイコンが普及するまで、正確な位置決め機構の多くはステッピングモータを使用しました。
(3)欠点としては、高速回転に適さないことと、停止中も励磁電流が必要で発熱がある点です。
(4)高速で正確な位置決めが必要な場合、従来はDCサーボを使用しました。
(5)現在の主流はブラシレスのACサーボです。
(6)正確なサーボを行うには、ロータリーエンコーダーやリニアエンコーダが必要となります。
(7)これらの部品は高価であり、正確なサーボ機構は高価なものとなります。
(8)高速性能のみをがまんすれば、ステッピングモーターは安価に正確な位置決めが実現できます。
(9)今回の制御にはマイコンを使用しましたが、サンプルプログラムは驚くほど単純です。
 20章:糸巻き式自動深さ測定機(1)機構編に行く。
20章:糸巻き式自動深さ測定機(1)機構編に行く。